

A Calculation Method of 3D Position and Normal Vector of Planar Parts Based on Depth Map
A technology of three-dimensional position and calculation method, which is applied in the direction of measuring devices, optical devices, instruments, etc., can solve the problems of non-uniformity, limited promotion of visual three-dimensional positioning software, weak versatility and robustness, etc., and achieves good stability. and the effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
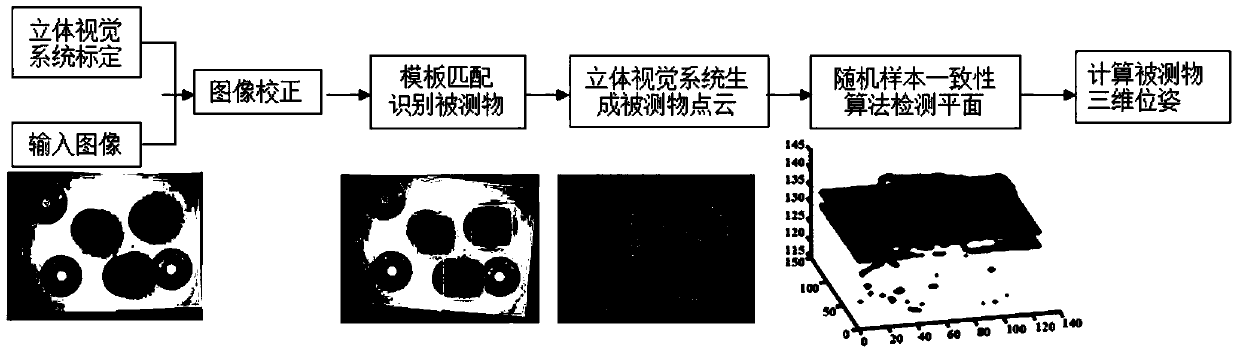
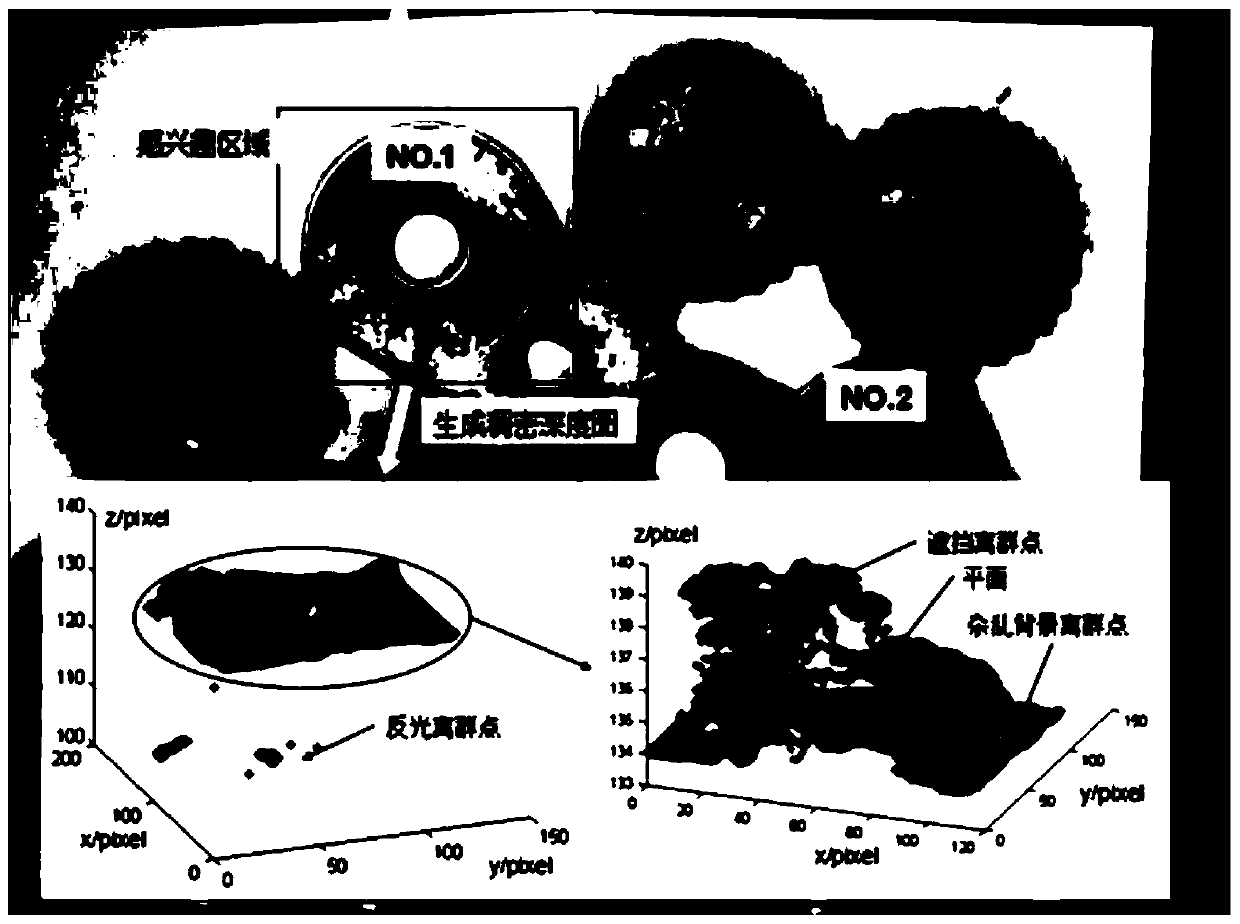
[0062] Such as figure 1 Shown is a flow chart of the method for calculating the three-dimensional position and normal vector of a part based on a depth map in the present invention. First, use the binocular stereo vision system to acquire the left and right images; then, use the shape matching algorithm to identify the part in the left image, and calculate the dense depth map of the part; then, use non-uniform sampling techniques and statistical analysis methods to remove the dense depth map outlier data in; fourth, use the random sampling consensus algorithm to fit the plane in the dense depth map; finally, calculate the three-dimensional position and normal vector of the part according to the plane equation, and perform coordinate transformation.
[0063] Specific steps are as follows:
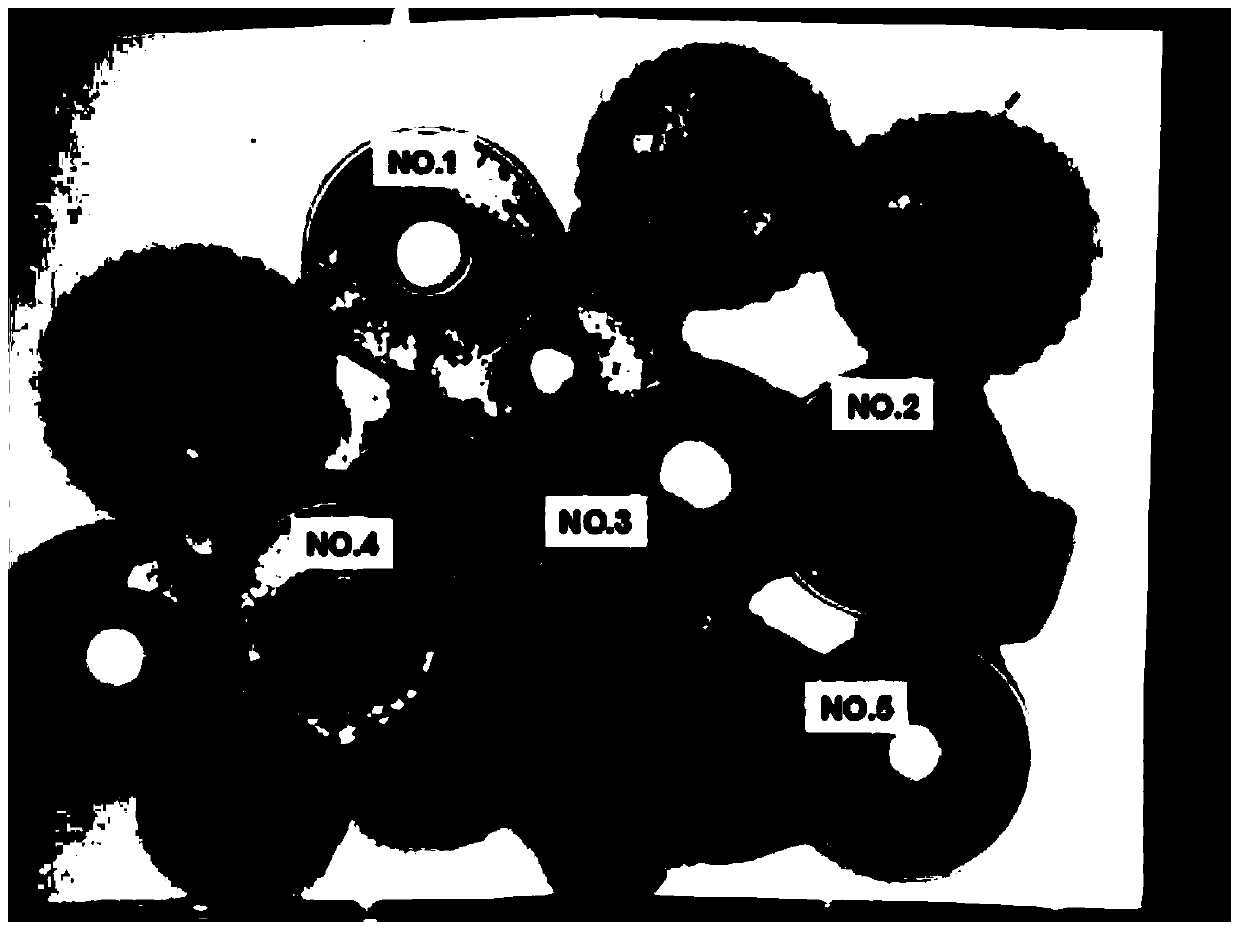
[0064] Step 1: Create a template image with a size of 140 pixels*140 pixels, obtain the left and right images with a size of 1280 pixels*960 pixels, and use the shape matching algorithm to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More