

A bionic flexible wearable lower limb exoskeleton driven by pneumatic artificial muscles
A pneumatic artificial muscle and exoskeleton suit technology, applied in the field of robotics, can solve the problems of low human coordination, poor flexibility of lower limb exoskeleton robots, and poor bionic performance, and achieve the effects of good flexibility, high bionics, and improved comfort.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
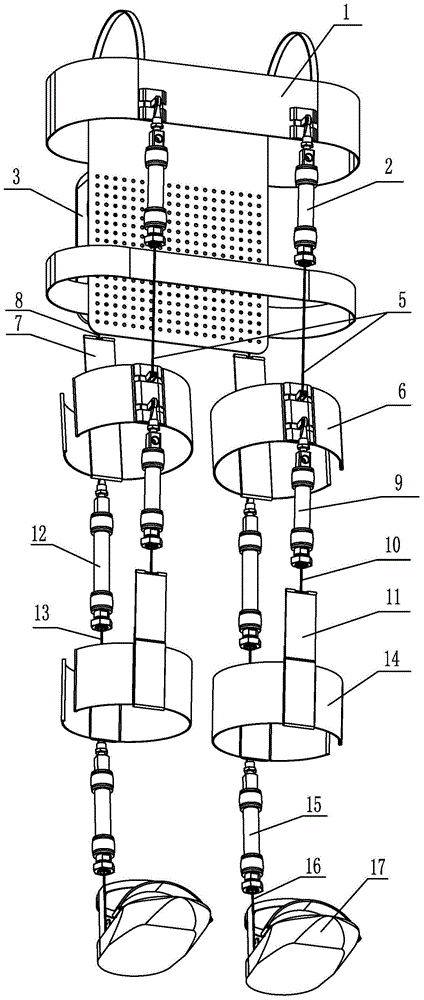
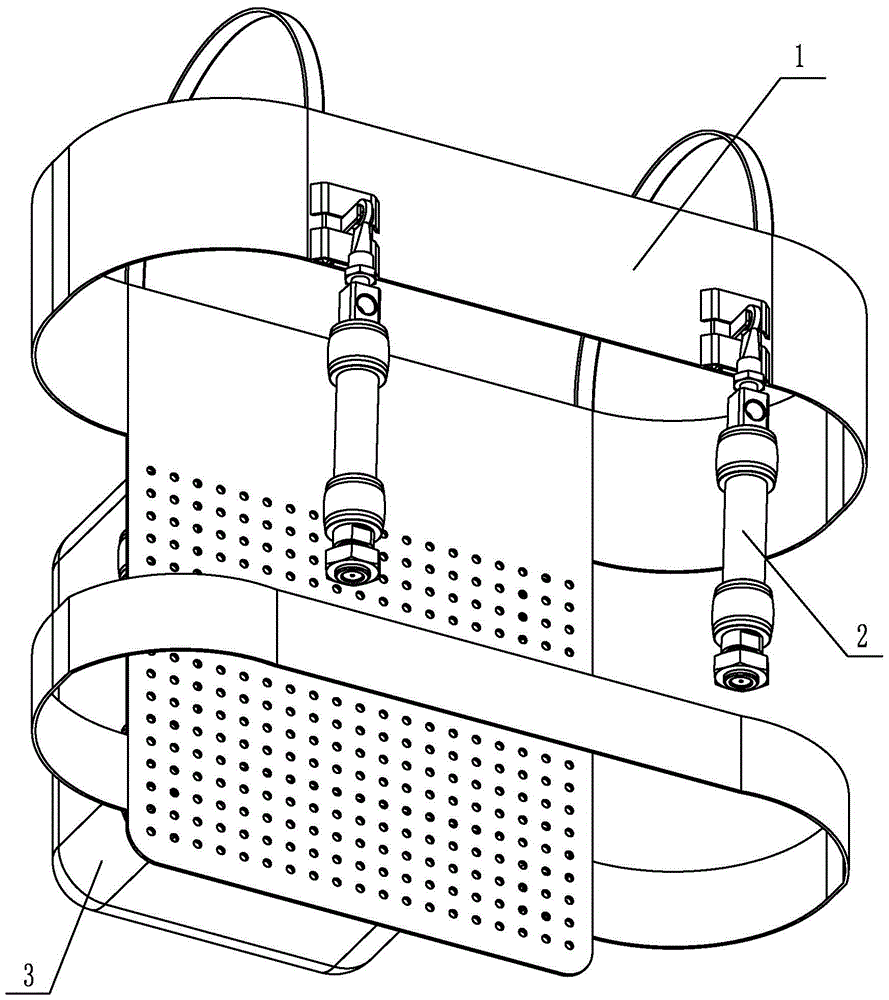
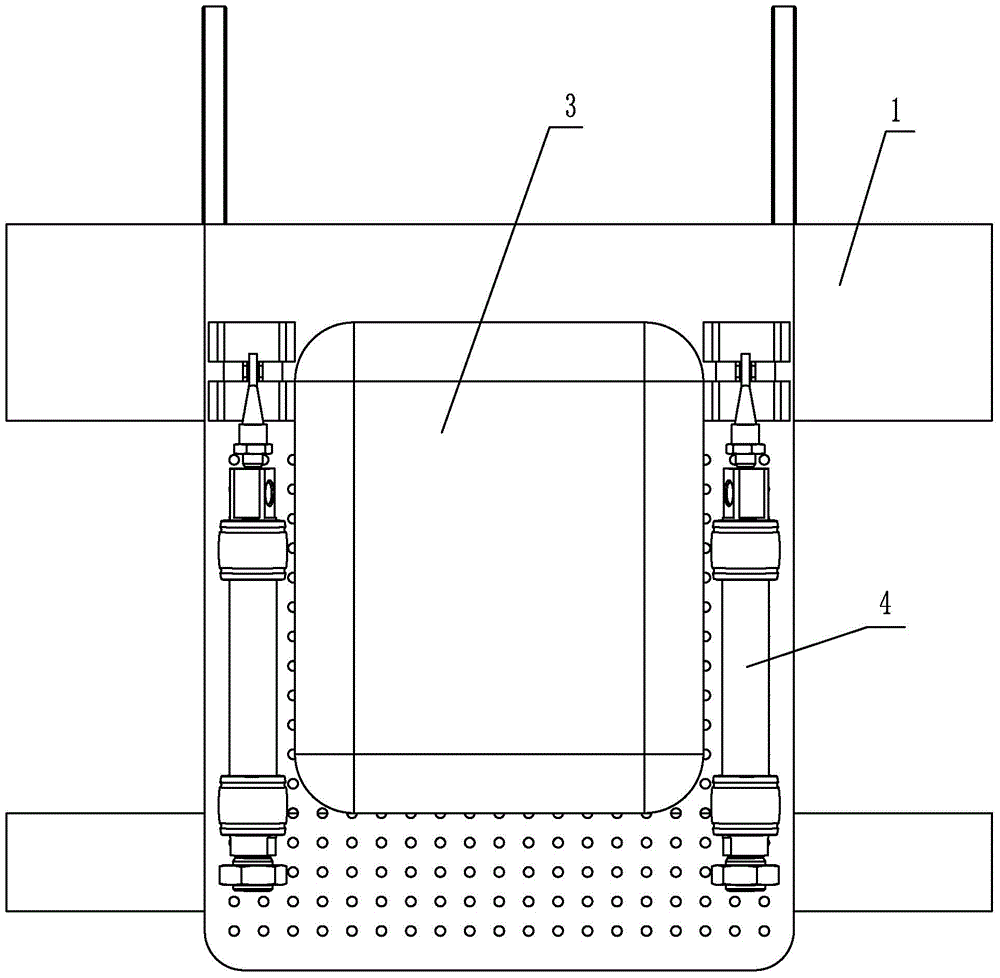
[0013] Specific implementation mode one: combine Figure 1-Figure 7 Illustrate, a kind of bionic flexible wearable lower extremity exoskeleton clothing driven by pneumatic artificial muscle of the present embodiment, it comprises left leg and right leg; It also comprises suspension vest 1, left leg and right leg respectively comprise hip driving system, Knee drive system and foot drive system;
[0014] The hip drive system includes the hip joint forward flexion driven pneumatic artificial muscle 2, the hip joint backward drive pneumatic artificial muscle 4, the hip joint forward flexion flexible rope 5, the thigh strap 6, the hip joint rear extension belt 7 and the hip joint extension transition Connect the flexible rope 8;
[0015] The knee drive system includes knee joint protraction driving pneumatic artificial muscle 9, knee joint protraction transition connection flexible rope 10, knee joint protraction belt 11, knee joint flexion driving pneumatic artificial muscle 12, ...
specific Embodiment approach 2
[0022] Specific implementation mode two: combination figure 1 , Figure 4 and Figure 5 To illustrate, the thigh binding belt 6 of this embodiment is a canvas belt. With such arrangement, it is easy to wear, strong and resistant to folding, good in flexibility, and has a large contact area with the human body, which greatly improves the comfort of the human body after wearing. Others are the same as in the first embodiment.
specific Embodiment approach 3
[0023] Specific implementation mode three: combination figure 1 and Figure 6 To illustrate, the calf binding belt 14 of this embodiment is a canvas belt. With such arrangement, it is easy to wear, strong and resistant to folding, good in flexibility, and has a large contact area with the human body, which greatly improves the comfort of the human body after wearing. Others are the same as in the first or second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More