

Smooth and self-adaptive valve screwing mechanical arm mechanism
A manipulator and self-adaptive technology, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve the problems of low efficiency of disaster relief operations, high operating costs, and inability to achieve tolerances, etc., to achieve improved practical value, low production costs, and saving material effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
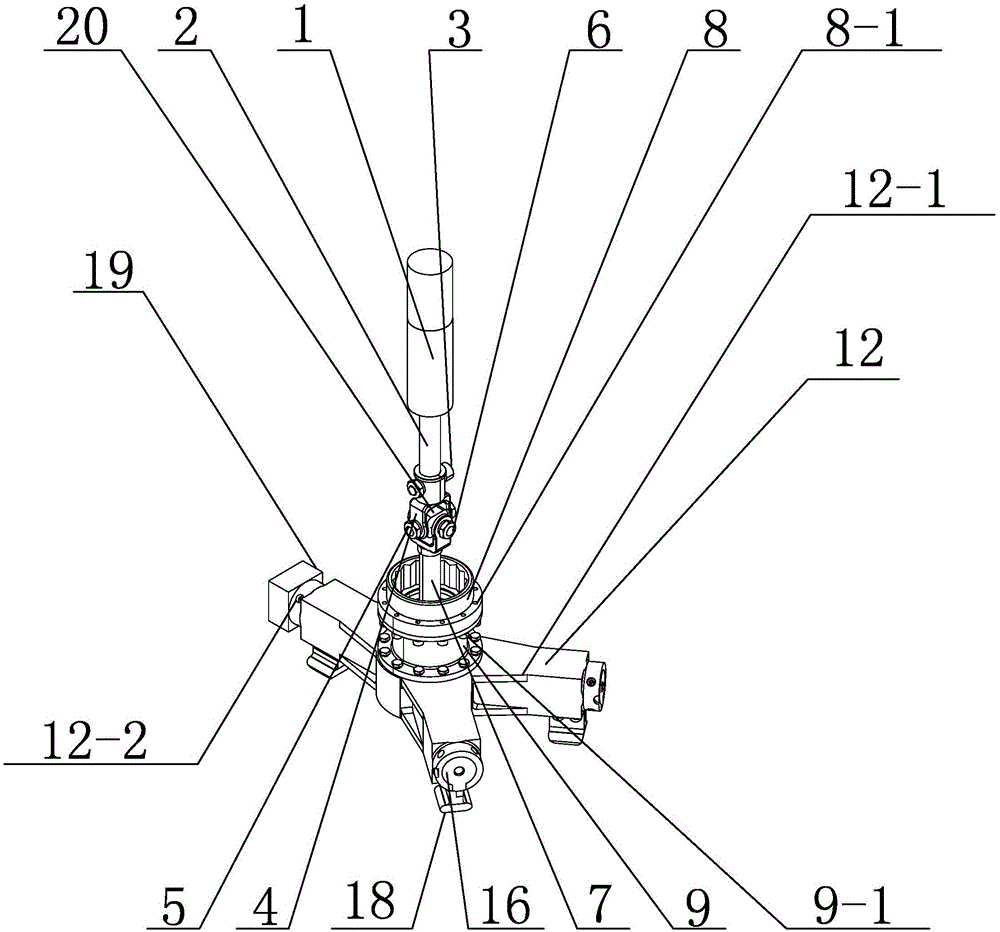
[0014] Specific implementation mode 1: Combine 1 to Figure 4 To explain this embodiment, a compliant and adaptive valve screwing manipulator mechanism of this embodiment includes a transmission mechanism, a tool interface mechanism, and a three-jaw manipulator. The transmission mechanism is connected to the three-jaw manipulator through the tool interface mechanism.
[0015] The transmission mechanism includes a servo motor 1, a spindle 2 and a Hooke hinge mechanism. The output end of the servo motor 1 is connected with the spindle 2, and the spindle 2 is provided with a Hooke hinge mechanism;
[0016] The tool interface mechanism includes a connecting end 8 and a tool interface 9. The tool interface 9 is mounted on the three-jaw manipulator, and the connecting end 8 is mounted on the tool interface 9;
[0017] The three-jaw manipulator includes a manipulator base 12, a large bevel gear 13, three small bevel gears 14, three lead screws 15, three lead screw bases 16, a mechanical fing...
specific Embodiment approach 2
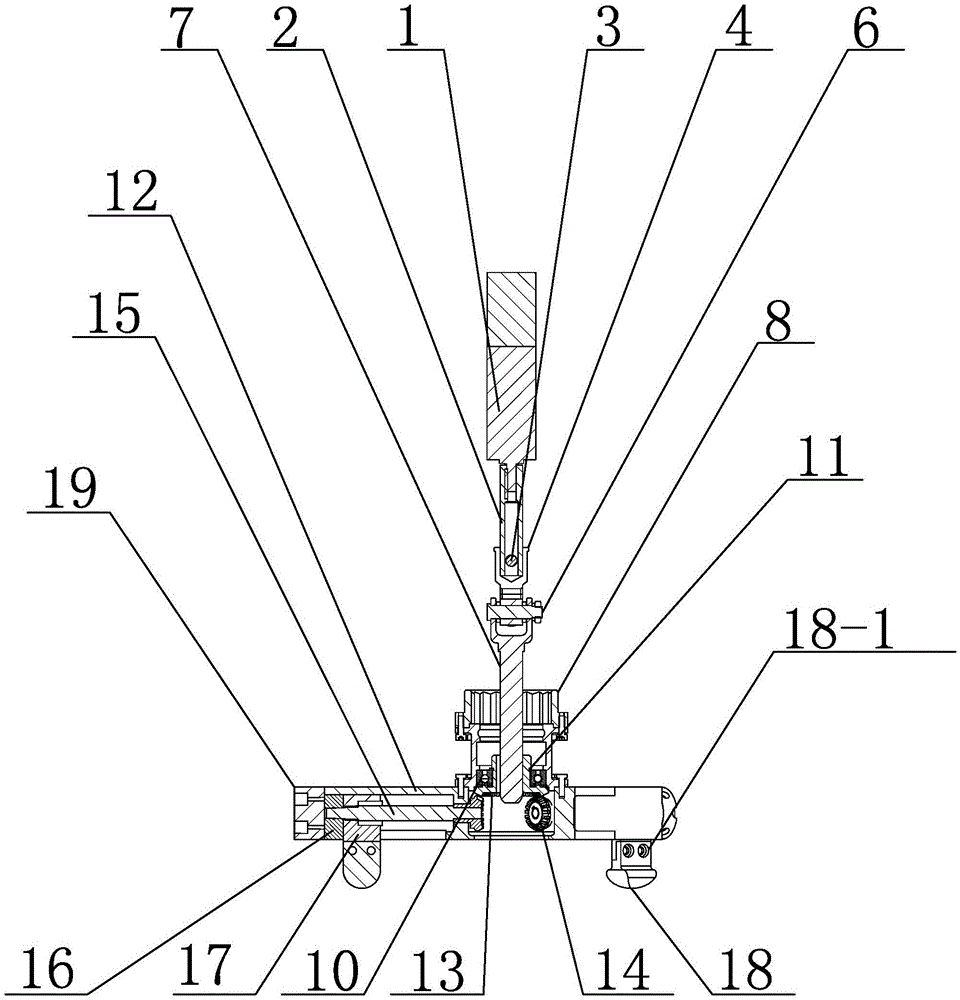
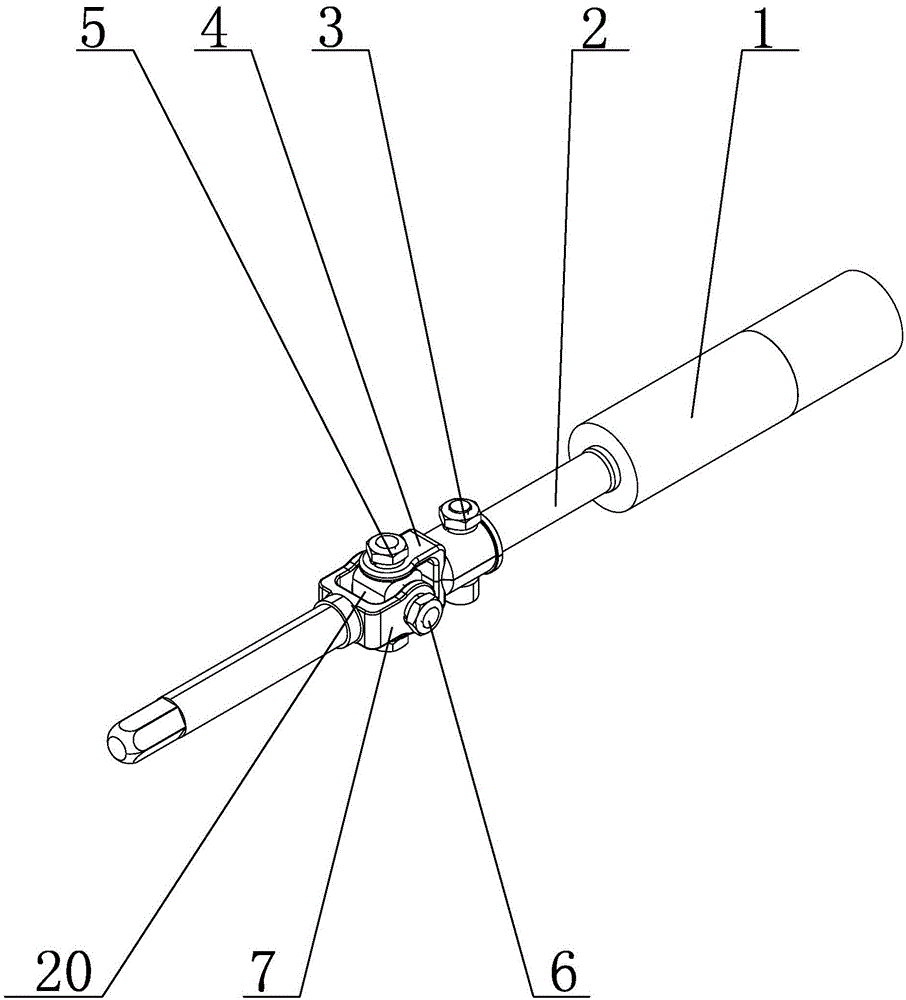
[0021] Specific implementation manner two: combination figure 1 , figure 2 with image 3 To illustrate this embodiment, the Hooke hinge mechanism of this embodiment includes a cross shaft outer ring 4, a central shaft 5, a bolt shaft 6, a cross shaft inner ring 7, a cross shaft 20, and a plurality of hexagon socket head screws 3, and the cross shaft outer ring The ring 4 is connected to the spindle 2 by a plurality of hexagon socket head screws 3, the two ends of the cross shaft 20 in the vertical direction are matched with the outer ring 4 of the cross shaft by two hexagon socket head screws 3, the bolt shaft 6 It is installed horizontally on the cross shaft 20, one end of the cross shaft inner ring 7 is connected to both ends of the bolt shaft 6, and the other end of the cross shaft inner ring 7 is connected to the mandrel 2. The above parts constitute the Hooke hinge mechanism. The Hooke hinge mechanism can realize the small-angle deflection of the output end, and the maximu...
specific Embodiment approach 3
[0022] Specific implementation mode three: combination figure 1 with figure 2 To explain this embodiment, the three-jaw manipulator of this embodiment further includes a counterweight iron 19 installed on the outside of any one of the claw bases on the manipulator base 12. Movement is more flexible. The other composition and connection relationship are the same as in the second embodiment.
PUM
| Property | Measurement | Unit |
|---|---|---|
| Angle | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More