

A Compliant Docking Device for Robotic Arm Based on Double Hooke Hinge Mechanism
A technology of a docking device and a manipulator, which is applied in the directions of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of difficult to protect the docking device, large contact force of the mechanism, complicated control, etc., and achieves simple structure, small docking contact force, and storage. The effect of process safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
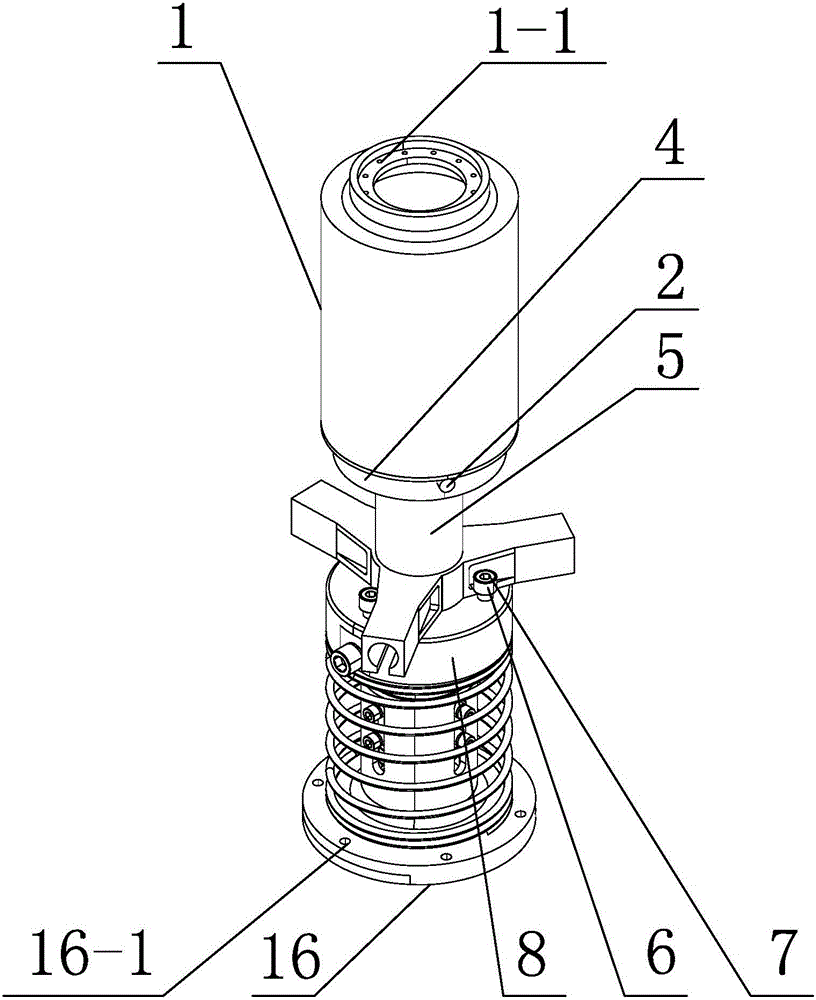
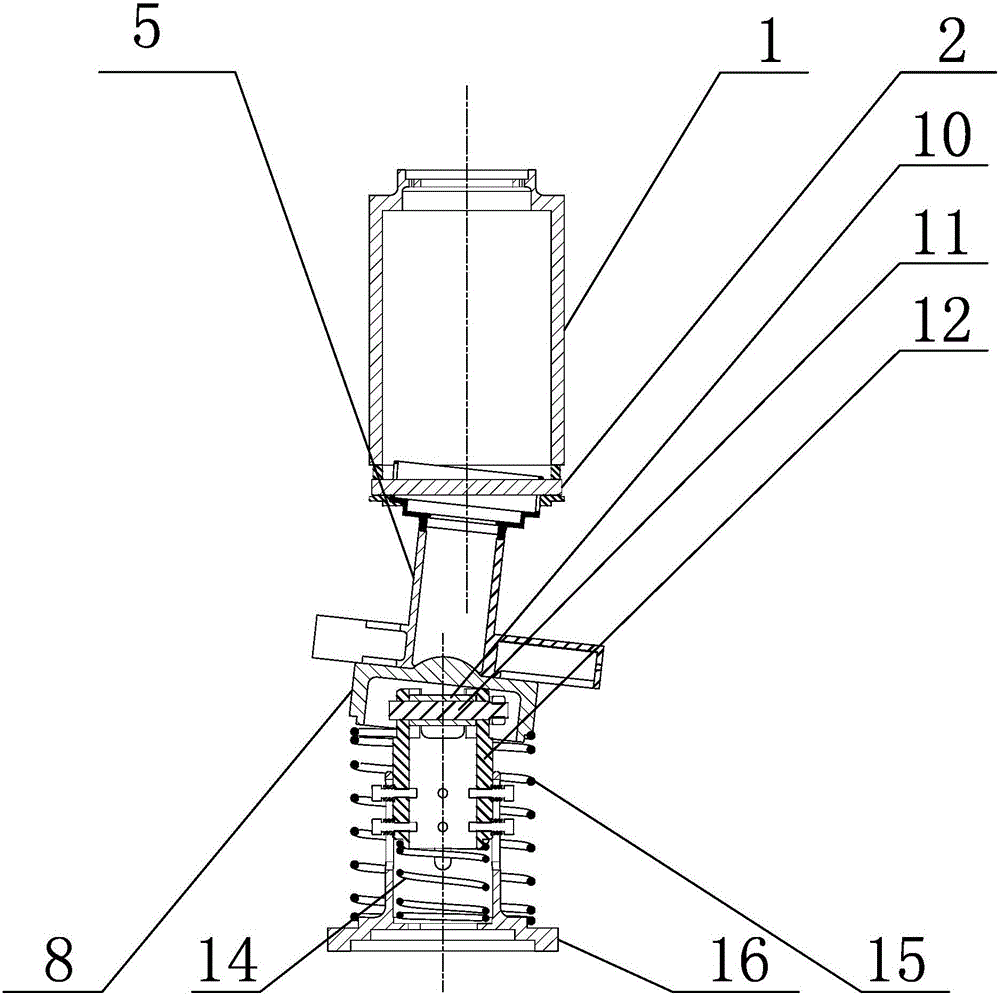
[0012] Specific embodiment one: combine 1 to Figure 7 Describe this embodiment. A compliant docking device for a robotic arm based on a double Hooke hinge mechanism in this embodiment includes an end effector of the robotic arm and a storage device for the end effector. The end effector of the robotic arm is installed on the upper end of the storage device for the end effector. ,
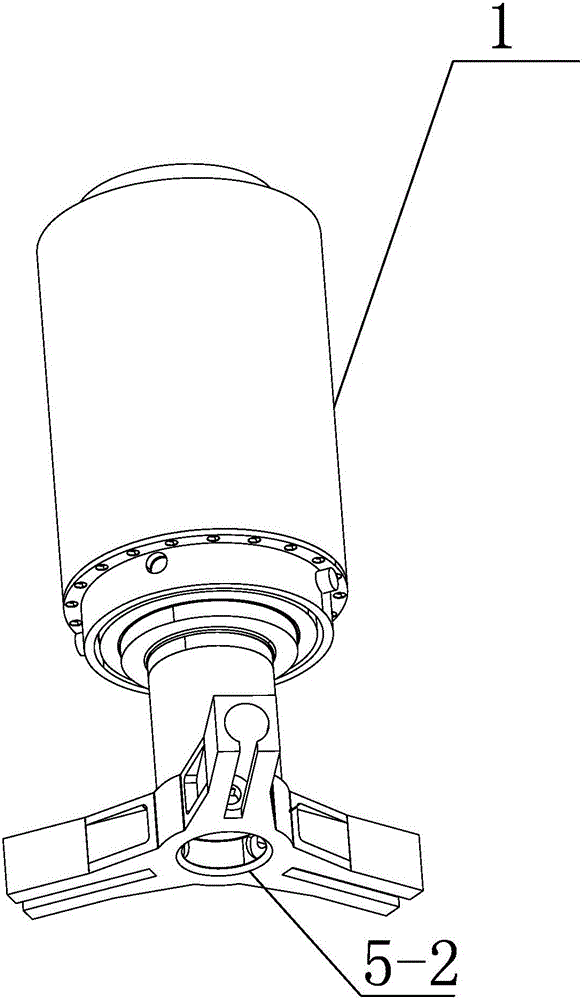
[0013] The end effector of the mechanical arm includes a first connecting piece 1, a first cross shaft 2, an inner ring 3, an outer ring 4 and a tool joint 5. The upper end of the first connecting piece 1 is connected to the external mechanical arm through a connecting hole 1-1. The first cross shaft 2 is installed on the upper part of the tool joint 5, the inner ring 3 is installed on the inner side wall of the upper end of the tool joint 5, the outer ring 4 is installed on the upper outer side wall of the tool joint 5, and the lower end of the first connector 1 passes through the outer ring 4 Co...
specific Embodiment approach 2
[0018] Specific implementation mode two: combination Figure 1 to Figure 4 To illustrate this embodiment, the tool joint 5 of this embodiment includes a column and three connecting arms, and different tools can be placed in the connecting arms to realize different functions. The three connecting arms are evenly connected to the lower end of the column, a spherical groove 5-2 is provided at the center of the bottom end where the three connecting arms meet, and a groove 5-2 is provided on both sides of each connecting arm. 1. The groove 5-2 can realize the cooperation with the hemispherical protrusion 8-1 on the top of the connecting seat 8 to realize the positioning of the end effector; Clamp it tightly so that the robotic arm can be disengaged from the end effector. Other compositions and connections are the same as in the first embodiment.
specific Embodiment approach 3
[0019] Specific implementation mode three: combination Figure 5 Describe this embodiment, the Hooke hinge mechanism of this embodiment also includes 3 locking sleeves 6 and 3 first screws 7, 3 first screws 7 are installed on the connection seat 8, and each first screw 7 is set There is a locking sleeve 6. The first screw 7 fastens the locking sleeve 6 connected thereto on the connecting base 8 . When the mechanical arm is disengaged from the end effector, the locking sleeve 6 can be clamped to the groove 5-1 to facilitate the disengagement of the mechanical arm from the end effector. Other compositions and connections are the same as those in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More