

Robust H-infinity-based variable-gain decoupling control method
A technology of decoupling control and variable gain, applied in the field of automatic control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
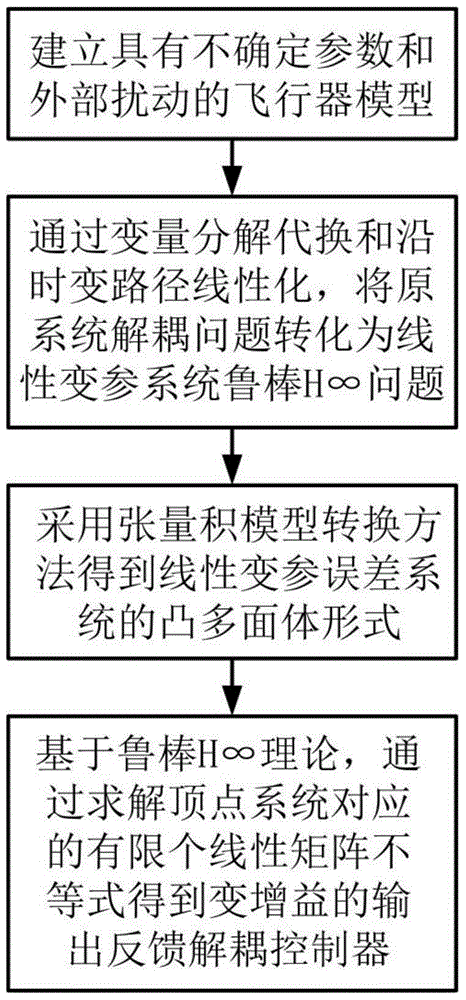
[0012] refer to figure 1 , the present invention is based on a robust H ∞ The specific implementation of the variable gain decoupling control method comprises the following steps:
[0013] Step 1, considering the dynamic process of the speed, angle of attack and track angle of the aircraft, establish a longitudinal dynamic model such as formula (1), which has the characteristics of nonlinear, strong coupling, multivariate and uncertain.
[0014]
[0015]
[0016]
[0017] where, λ=λ * +xcosψ / R E , R=R E +h, And V, μ, α, q, x, h are flight speed, pitch track angle, angle of attack, pitch angular velocity, flight distance and flight height, respectively. f x ,F z is the generalized force derived from aerodynamic forces and thrust, dF x ,dF z is the elastic mode and the disturbance force caused by the external disturbance. In addition, the mass of the aircraft m, the acceleration of gravity g, the angular velocity of the earth's rotation ω E , the earth's ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More