

Measurement analysis and control method and device for unmanned aerial vehicle autonomous landing
A technology of autonomous landing and analysis method, applied in the field of unmanned aerial vehicles, can solve the problem of low control precision, achieve the effect of solving low control precision and improving landing control precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present invention will be described in detail below with reference to the accompanying drawings and examples.
[0026] In order to enable those skilled in the art to better understand the solutions of the present application, the technical solutions in the embodiments of the present application will be clearly and completely described below in conjunction with the drawings in the embodiments of the present application.
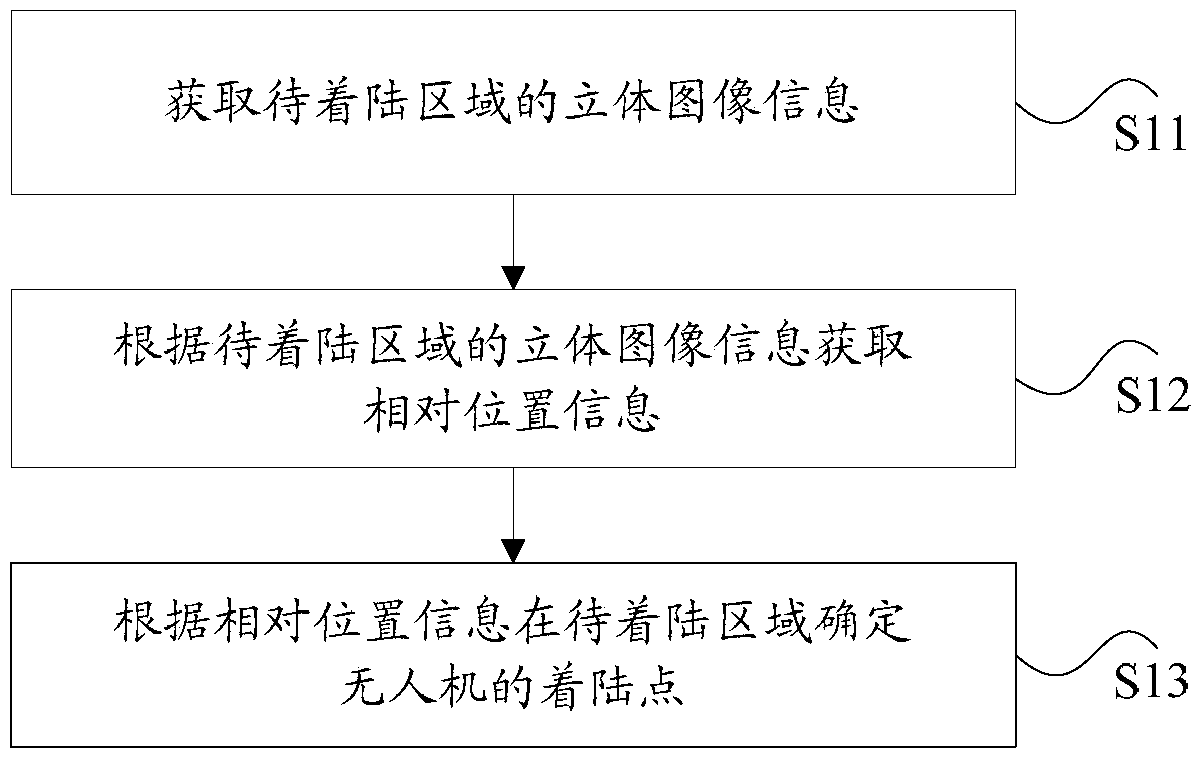
[0027] figure 1 It is a flow chart of the measurement and analysis method for autonomous landing of UAVs according to an embodiment of the present invention. Such as figure 1 As shown, the method includes the following steps:
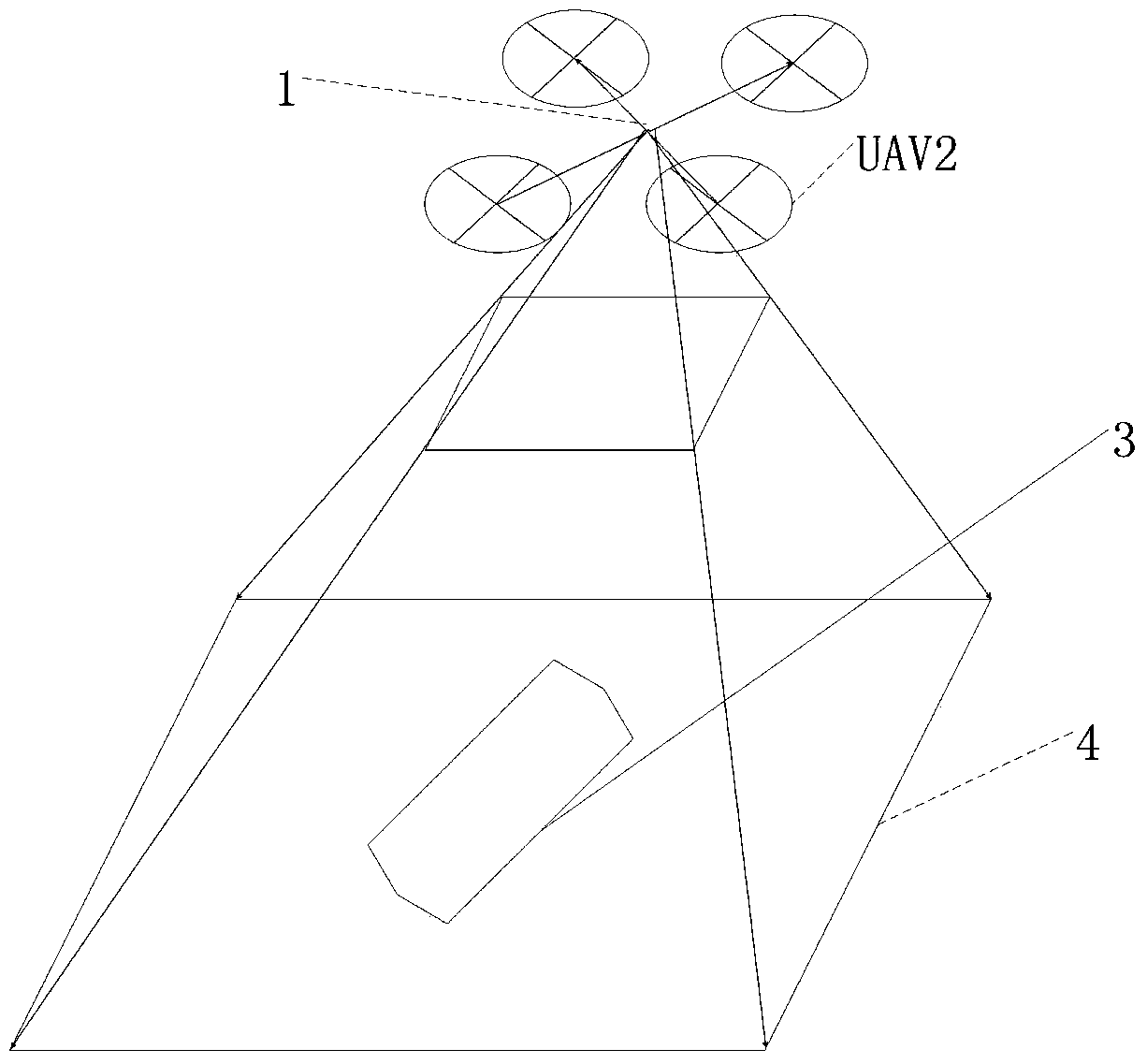
[0028] Step S11, acquiring stereoscopic image information of the area to be landed.
[0029] A camera device, for example, a camera, is provided on the UAV, w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More