

Continuous continuation method for closed-loop control parameters of accelerator motor control system
A motor control and closed-loop control technology, which is applied in the direction of electric controllers and controllers with specific characteristics, can solve the design complexity and cost increase of the closed-loop control system, the unfavorable shape and curvature accuracy and efficiency, and the inability to take into account the integrity and local characteristics to achieve the effect of solving low control precision, solving accuracy and low efficiency, and eliminating correlation problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0017] In order to describe in detail the technical content, structural features, achieved objectives and effects of the technical solution, the following detailed description is given in conjunction with specific embodiments and accompanying drawings.
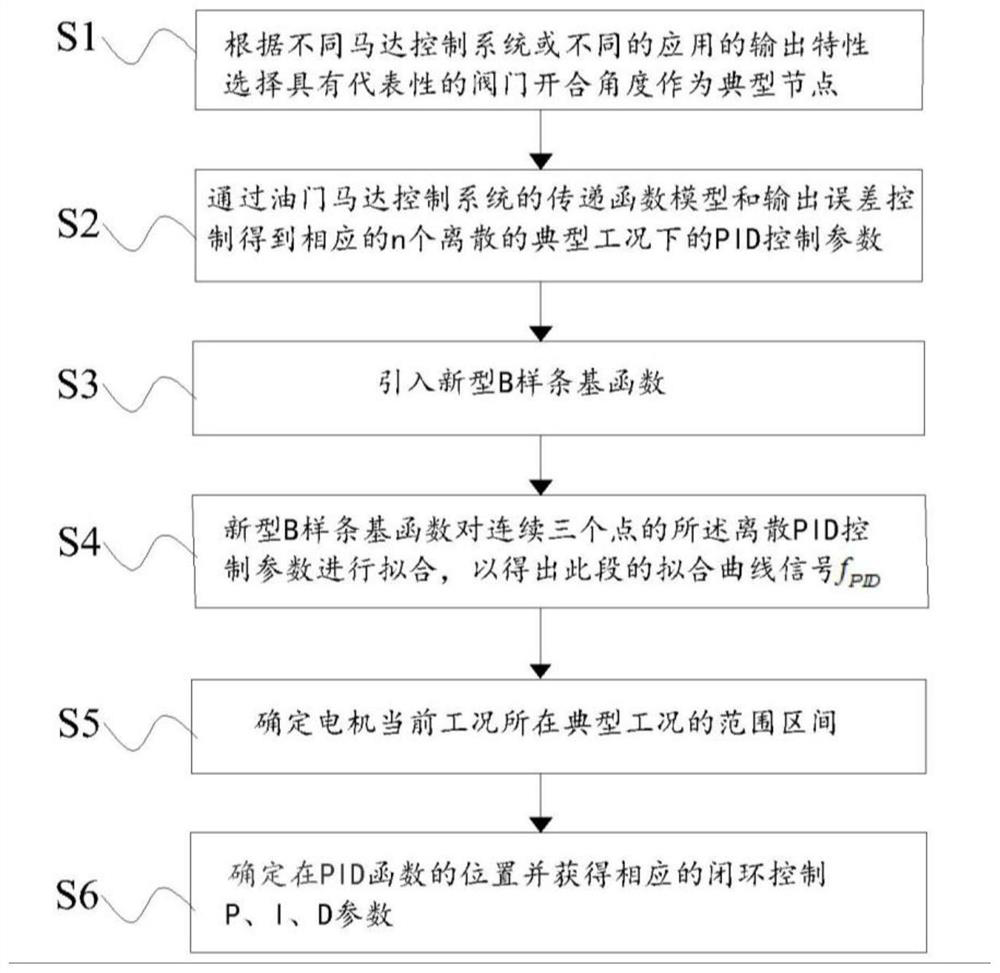
[0018] see figure 1 , In this embodiment, a method for continuous continuation of closed-loop control parameters of a throttle motor control system includes the following steps:
[0019] S1: Select a representative valve opening and closing angle as a typical node according to the output characteristics of different motor control systems or different applications;
[0020] S2: The corresponding n discrete PID control parameters M are obtained through the transfer function model of the throttle motor control system and the output error control i (P i ,I i ,D i ), i=0,...,n-1, where P i ,I i ,D i is the PID control parameter of the i-th node;
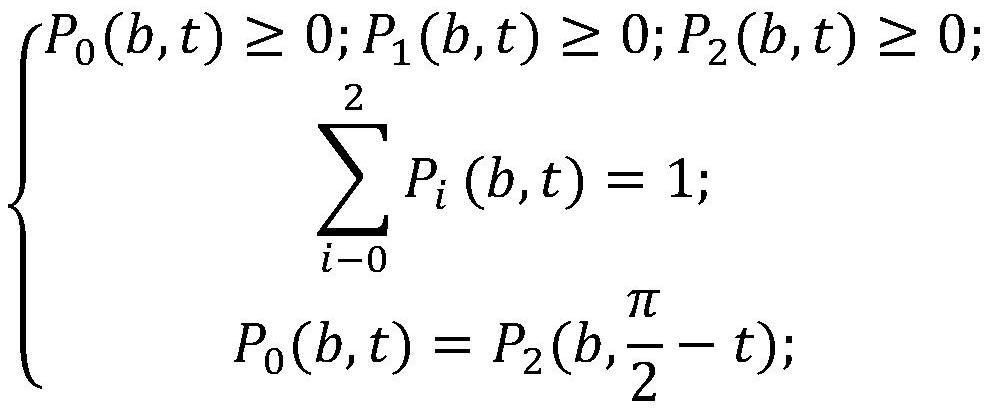
[0021] S3: The new B-spline basis function is introduced as:
[0022]
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More