Four-footed bio-robot single leg capable of achieving jumping function
A bionic robot and functional technology, applied in the field of robotics, can solve problems such as large volume, complex hydraulic drive structure and control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
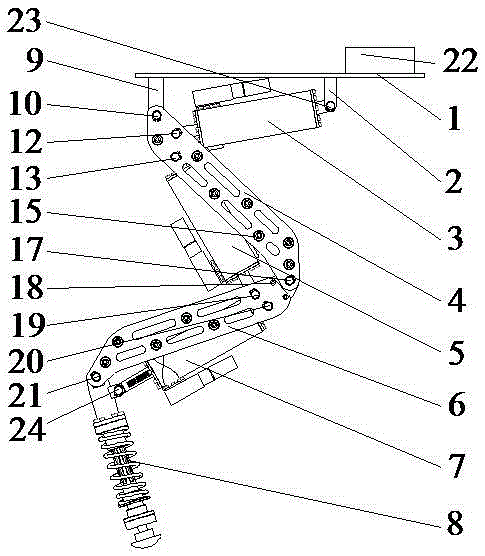
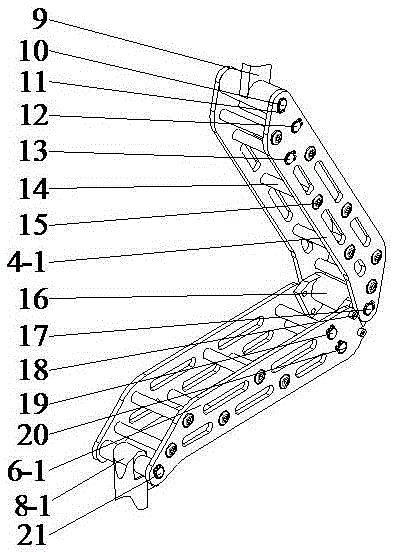
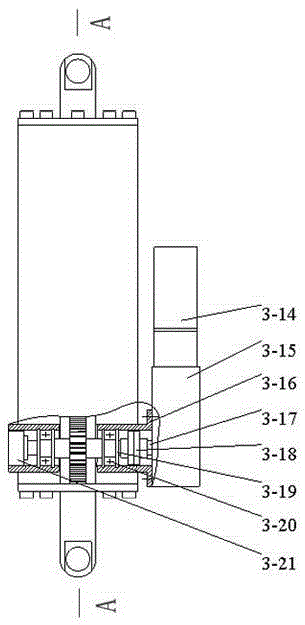
[0022] Example 1, such as Figure 1~4 As shown, the present invention provides a single leg of a quadruped bionic robot capable of jumping, comprising a fuselage 1, a thigh module 4, a calf module 6, an ankle 8 and an energy storage unit, and the fuselage 1 passes through a hip joint 9 It is hinged with the thigh module 4, and a hip joint energy storage unit 3 is arranged between the fuselage 1 and the thigh module 4; the calf module 6 is hinged with the thigh module 4 through the knee joint connector 16, and a The knee joint energy storage unit 5; the ankle 8 is hinged with the calf module 6 through the ankle joint connector 8-1, an ankle joint energy storage unit 7 is arranged between the ankle 8 and the calf module 6, and a motion control unit is arranged on the fuselage 1 twenty two.
[0023] Preferably, the fuselage 1 is fixedly connected with the energy storage unit connecting bracket 2 and the hip joint connecting piece 9 . The thigh module 4 includes two thigh side p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More