A springtail-like jumping robot with the ability to crawl
A springtail and robot technology, applied in the field of robotics, can solve the problems of limited adaptability in complex environments, inability to realize continuous jumping, low energy utilization efficiency, etc., and achieve the effects of good flexibility, simple driving mode, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
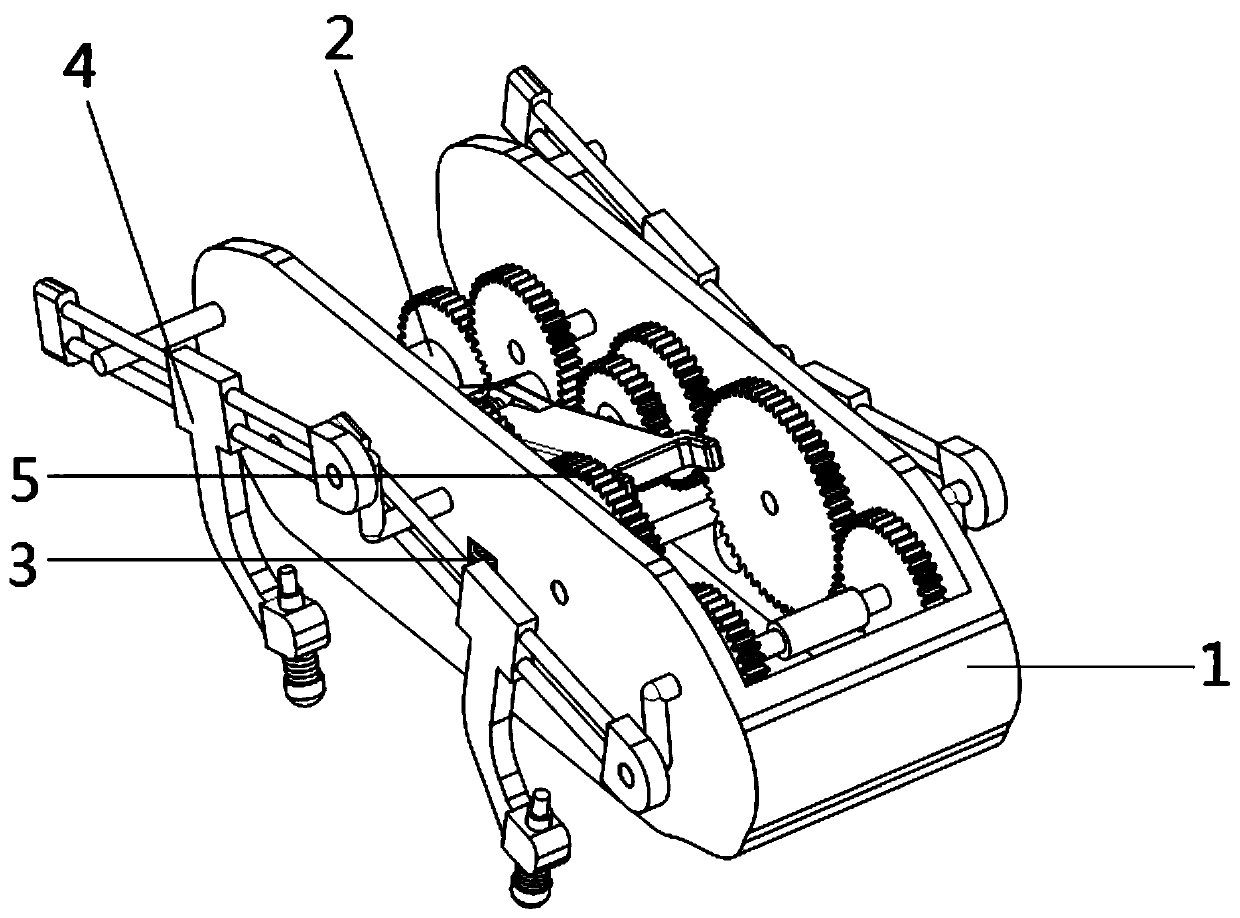
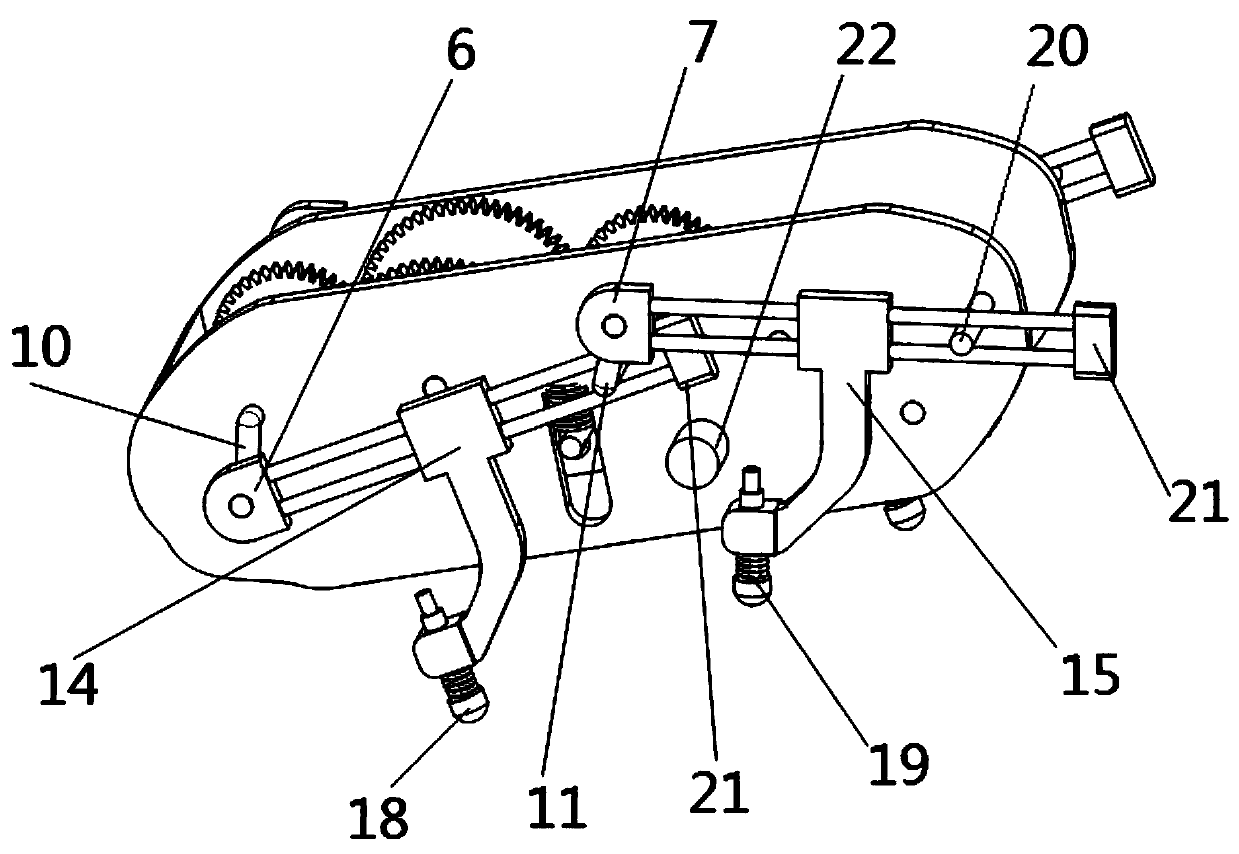
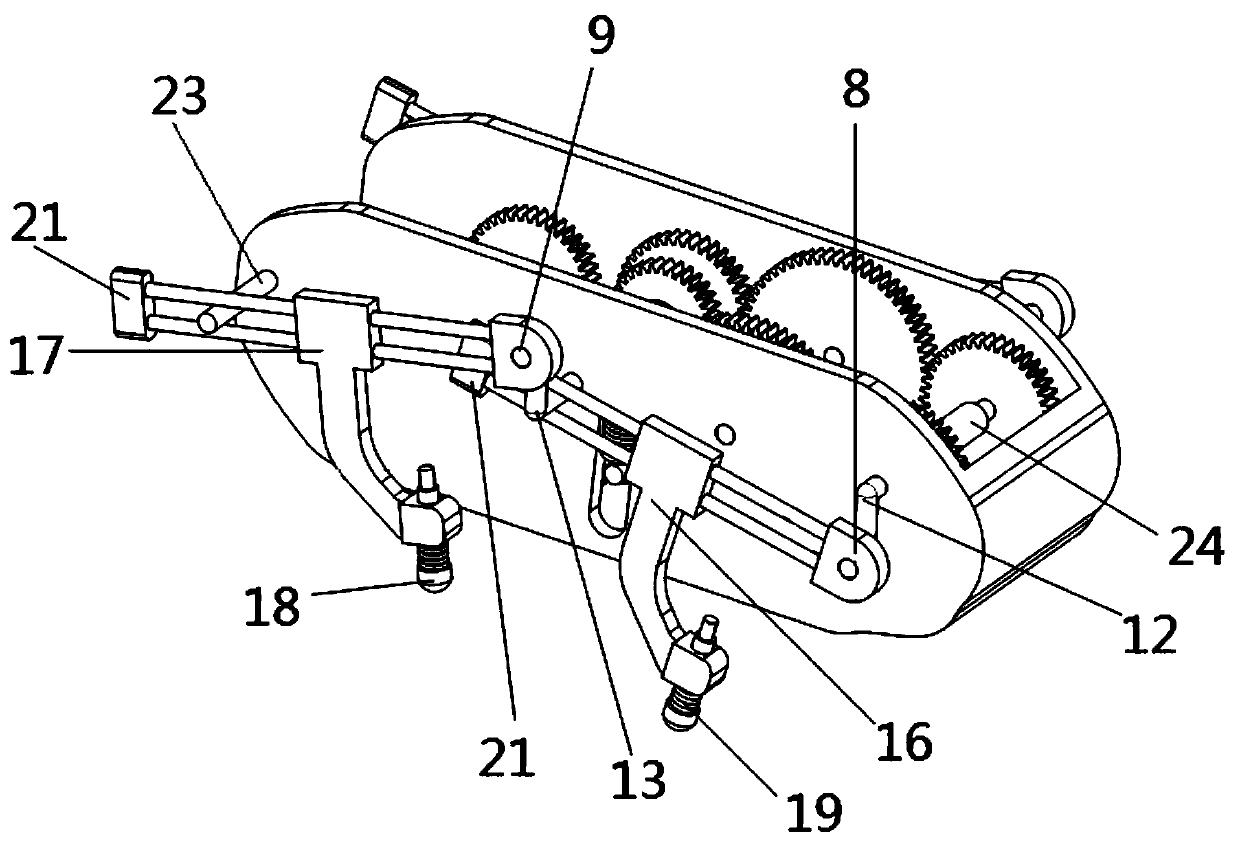
[0039] Such as Figure 1-9 As shown, the present embodiment provides a springtail jumping robot with crawling ability, including a fuselage 1, a jumping mechanism 2, an auxiliary jumping mechanism 3 and a crawling mechanism 4, and the jumping mechanism 2 includes a jumping rotation shaft 29, a base handle 40 With springboard 41, the afterbody of jumping rotating shaft 29 is installed in fuselage 1, and jumping rotating shaft 29 is connected with the first driving motor, and one end of base handle 40 is fixedly sleeved on jumping rotating shaft 29, and the other end of base handle 40 passes through a Connecting pin 42 is rotatably connected with an end of springboard 41, and a torsion spring 43 is also sleeved on connecting pin 42, and one end of torsion spring 43 is connected with base handle 40, and the other end of torsion spring 43 is connected with springboard 41, as Figure 8 As shown, the backs of the base handle 40 and the springboard 41 are provided with protrusions, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More