

Two-wheeled self-balancing intelligent vehicle posture control method
An attitude control and self-balancing technology, applied in the field of inertial navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
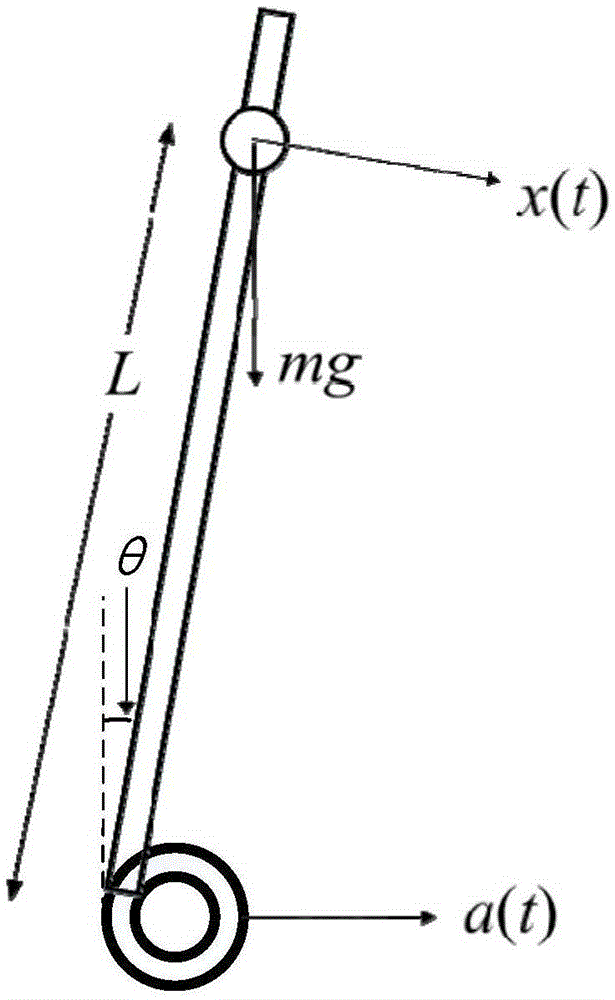
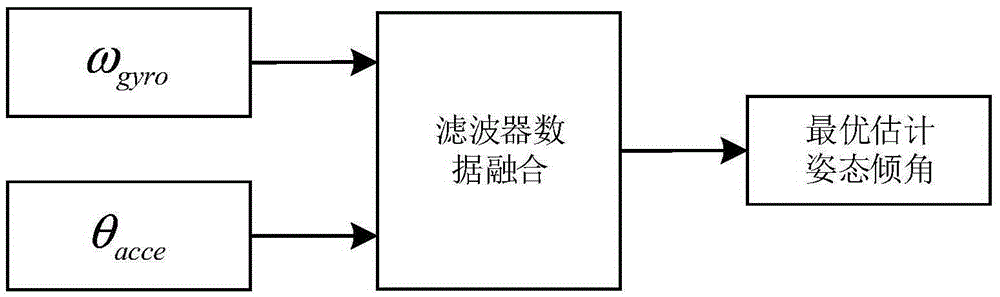
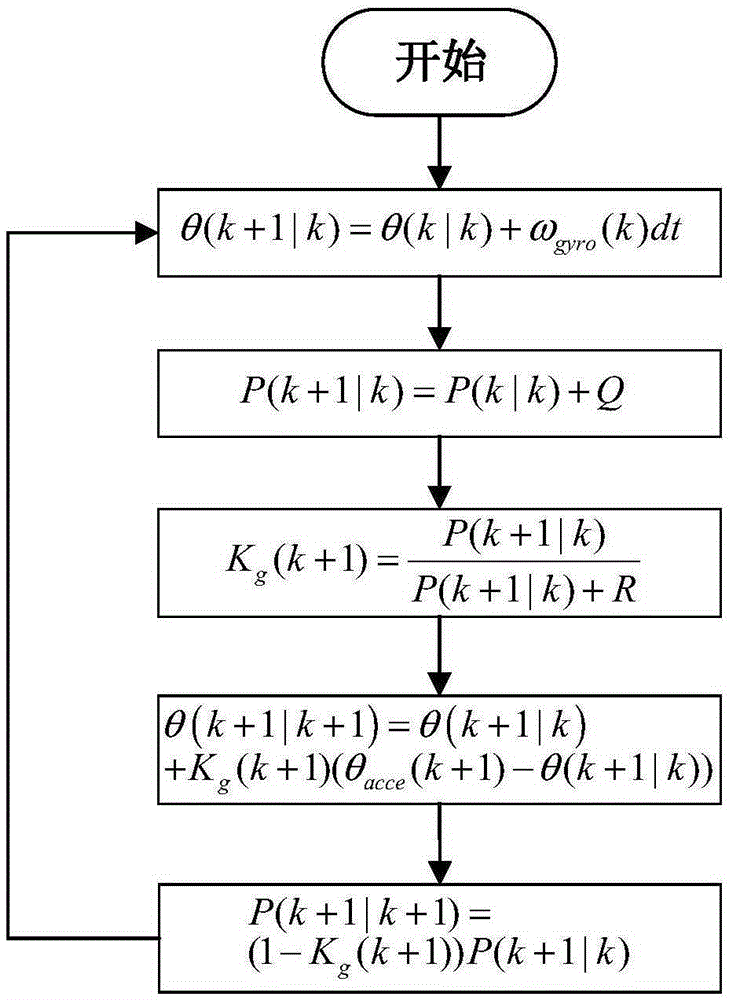
[0098] The self-designed two-wheel self-balancing intelligent vehicle platform is used to implement the attitude calculation method. Attitude control uses PD control, MPU6050 digital gyroscope and MMA7361 analog accelerometer constitute the attitude measurement system of the two-wheel self-balancing smart car and are rigidly connected with the smart car. The smart car obtains the attitude information output by the gyroscope including the drift caused by temperature, friction and unstable torque through the IIC interface, and obtains the attitude information including high-frequency dynamic acceleration noise output by the accelerometer through the ADC interface. After the above-mentioned attitude information units are normalized, apply the solution method described in claim 3 to carry out attitude calculation to obtain the optimal estimate of attitude inclination, and its initial state (when k=0) relevant parameters are as follows:
[0099] Integration time T: 0.005;
[0100]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More