

A vehicle attitude safety early warning method and system
A vehicle posture and safety early warning technology, applied to road network navigators and other directions, can solve problems such as safety hazards, display delays, driver distraction, etc., achieve accurate vehicle posture safety early warning, improve accuracy, and improve attitude calculation accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
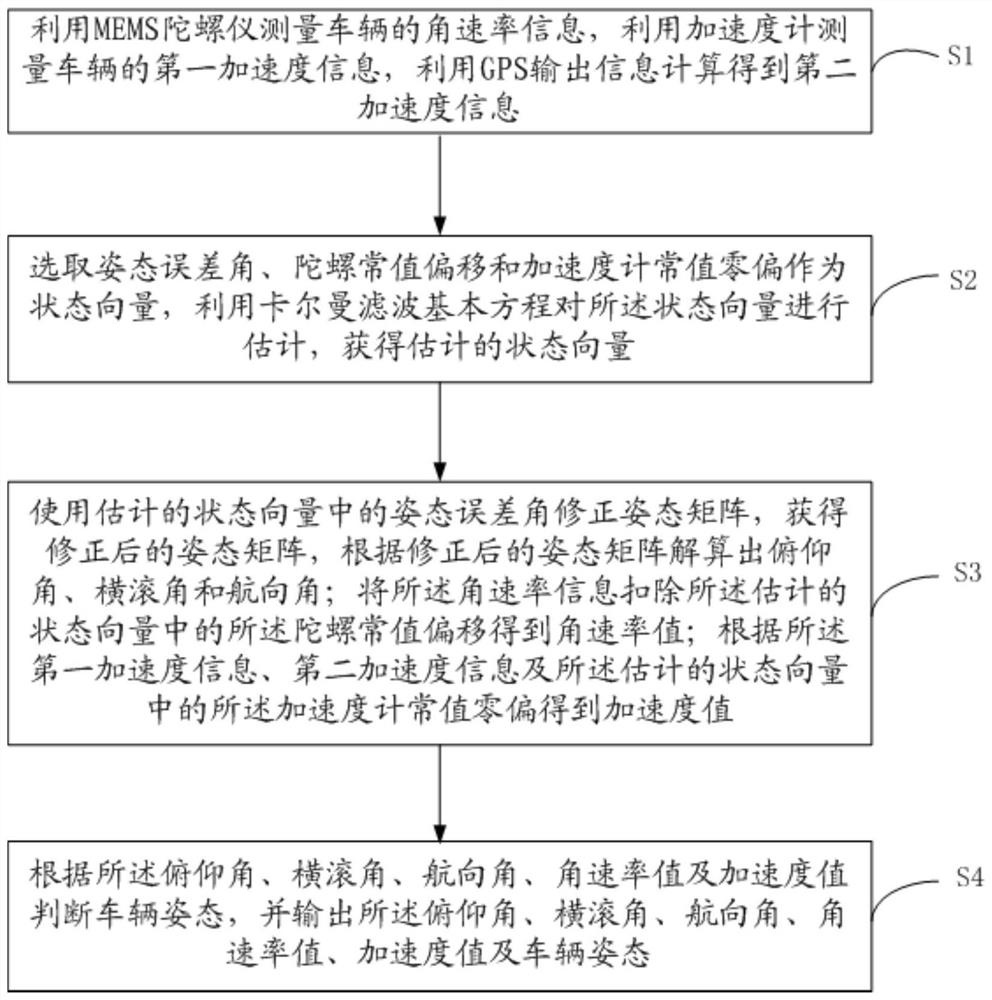
[0053] Such as figure 1 As shown, the present embodiment provides a vehicle attitude safety early warning method, which includes the following steps:
[0054] S1: Use the MEMS gyroscope to measure the angular rate information of the vehicle, use the accelerometer to measure the first acceleration information of the vehicle, and use the GPS output information to calculate the second acceleration information;
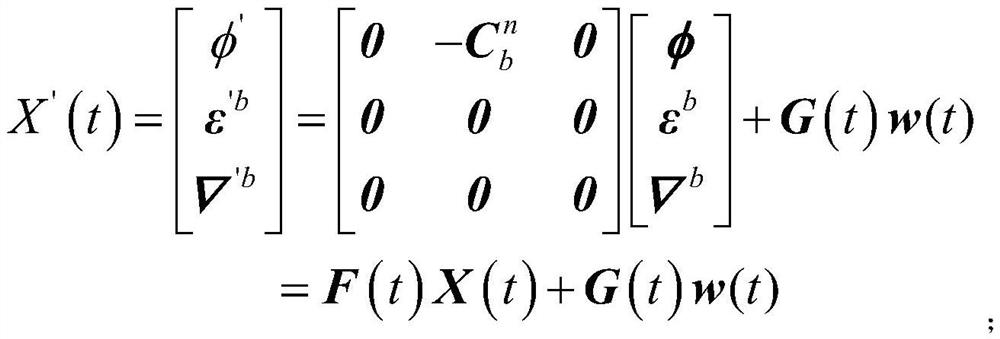
[0055] S2: select the attitude error angle, the gyro constant value offset and the accelerometer constant value zero offset as the state vector, use the Kalman filter basic equation to estimate the state vector, and obtain the estimated state vector;
[0056] S3: Use the attitude error angle in the estimated state vector to correct the attitude matrix to obtain the corrected attitude matrix, and calculate the pitch angle, roll angle and heading angle according to the corrected attitude matrix; Deducting the gyro constant value offset in the estimated state vector from an...
Embodiment 2
[0060] The vehicle posture safety early warning method provided in this embodiment not only includes the steps described in Embodiment 1, but also specifically involves the following processes.
[0061] Also include the following steps before step S2:
[0062] Calibrate the angular rate information obtained by the gyroscope on the X, Y, and Z axes and the acceleration information obtained by the accelerometer on the three axes, and obtain the calibrated angular rate information and first acceleration information;
[0063] Delay about 0.6 seconds to match the calibrated first acceleration information with the acceleration information obtained by GPS, that is, compare the calibrated first acceleration information with the second acceleration information calculated according to the GPS output information, and calculate the two Acceleration matching information is obtained, and then orthogonal calibration is performed on the calibrated angular rate information to eliminate errors;...
Embodiment 3
[0112] Based on the above-mentioned vehicle attitude safety early warning method, the present embodiment provides a vehicle attitude safety early warning system, which includes:
[0113] MEMS gyroscope, used to measure the angular rate information of the vehicle;
[0114] an accelerometer for measuring the first acceleration information of the vehicle in real time;
[0115] GPS, for obtaining the second acceleration information of the vehicle;
[0116] The attitude calculation unit is configured to perform attitude calculation according to the angular rate information, the first acceleration information and the second acceleration information, and obtain the attitude of the vehicle.
[0117]After the attitude calculation process, the attitude parameters of the vehicle are obtained, the attitude of the vehicle is judged according to the attitude parameters, and the attitude parameters and vehicle attitude are displayed on the interface through the display unit, and the corresp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More