

Unmanned all-terrain vehicle control method based on preview
An all-terrain vehicle and preview technology, applied in two-dimensional position/course control, vehicle position/route/height control, control/adjustment system, etc., can solve the problem of driving direction adjustment, time-consuming and labor-intensive, and inability to change vehicle speed in advance, etc. problems, to achieve the effect of avoiding emergency braking, flexible and stable steering, and improving ride comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] A kind of unmanned all-terrain wheel leg walking system control method of the present invention will be further described below in conjunction with accompanying drawing:
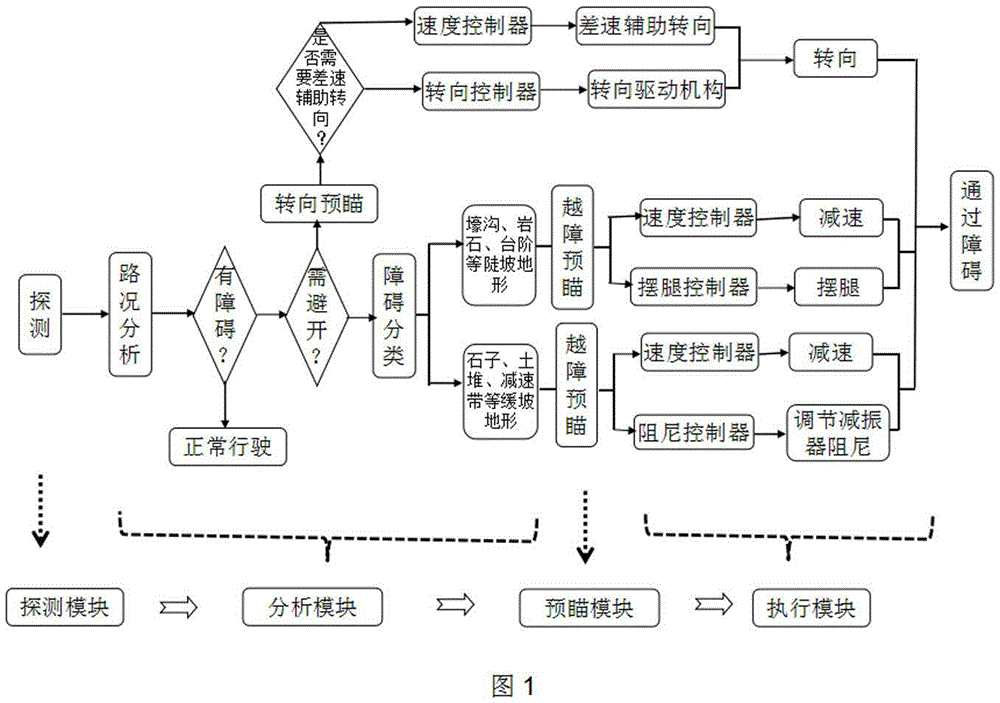
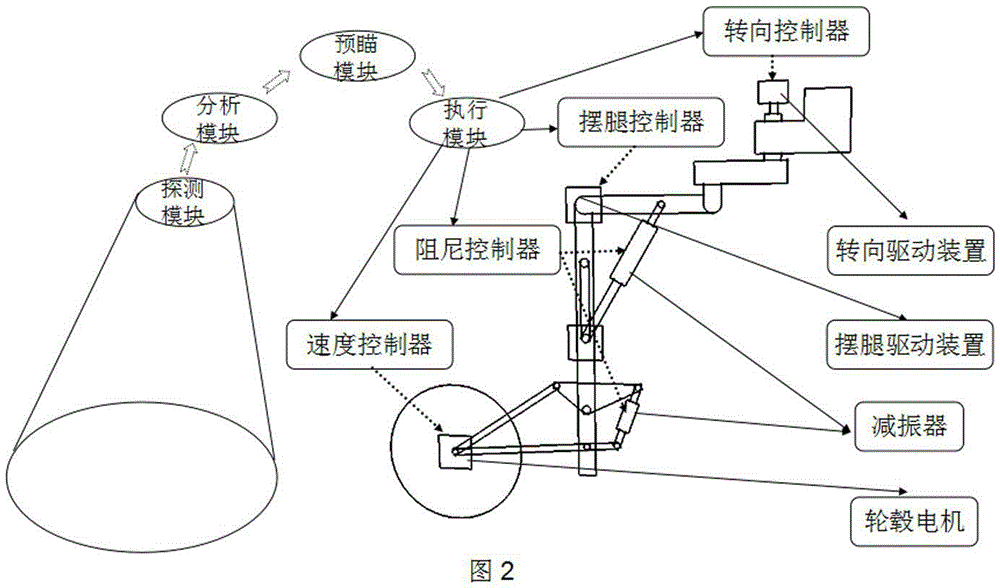
[0044] figure 1 , 2 Shown: The unmanned all-terrain vehicle includes two parts: the control system and the unmanned all-terrain wheel-leg walking system;
[0045] The control system includes:
[0046] A detection module for detecting the driving environment,
[0047] an analysis module for analyzing the detection results,
[0048] A preview module to develop an optimal strategy for passing obstacles based on the analysis results,
[0049] Execution module for execution according to the best strategy;
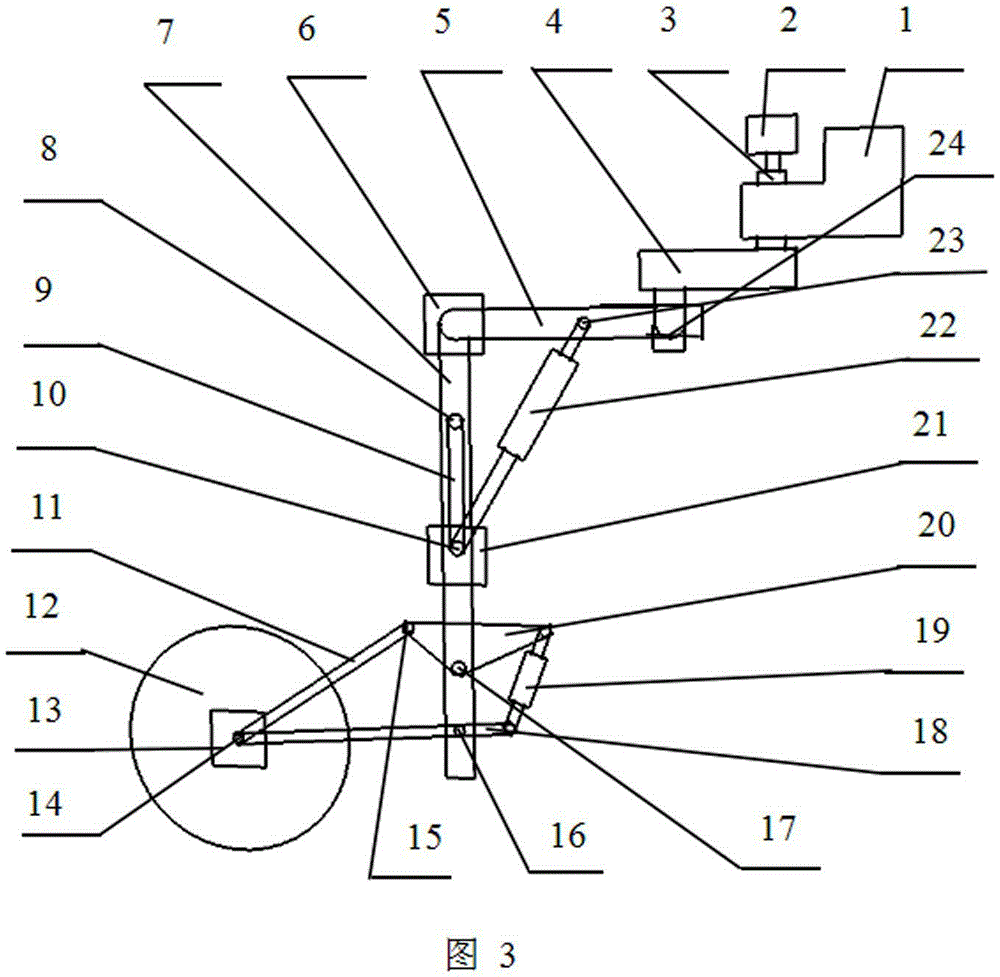
[0050] figure 2 Shown: the executive module includes four controllers of a speed controller, a steering controller, a damping controller and a swing leg controller, and also includes an in-wheel motor 13, a steering drive device 2, a shock absorber (including shock absorber one 19 And shock abso...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More