

Multi-rotor unmanned aerial vehicle automatic homeward flight path planning algorithm
A multi-rotor UAV, automatic return-to-home technology, applied in non-electric variable control, three-dimensional position/course control, vehicle position/route/altitude control, etc., can solve problems such as unavoidable obstacles, and avoid possible collision The effect of obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
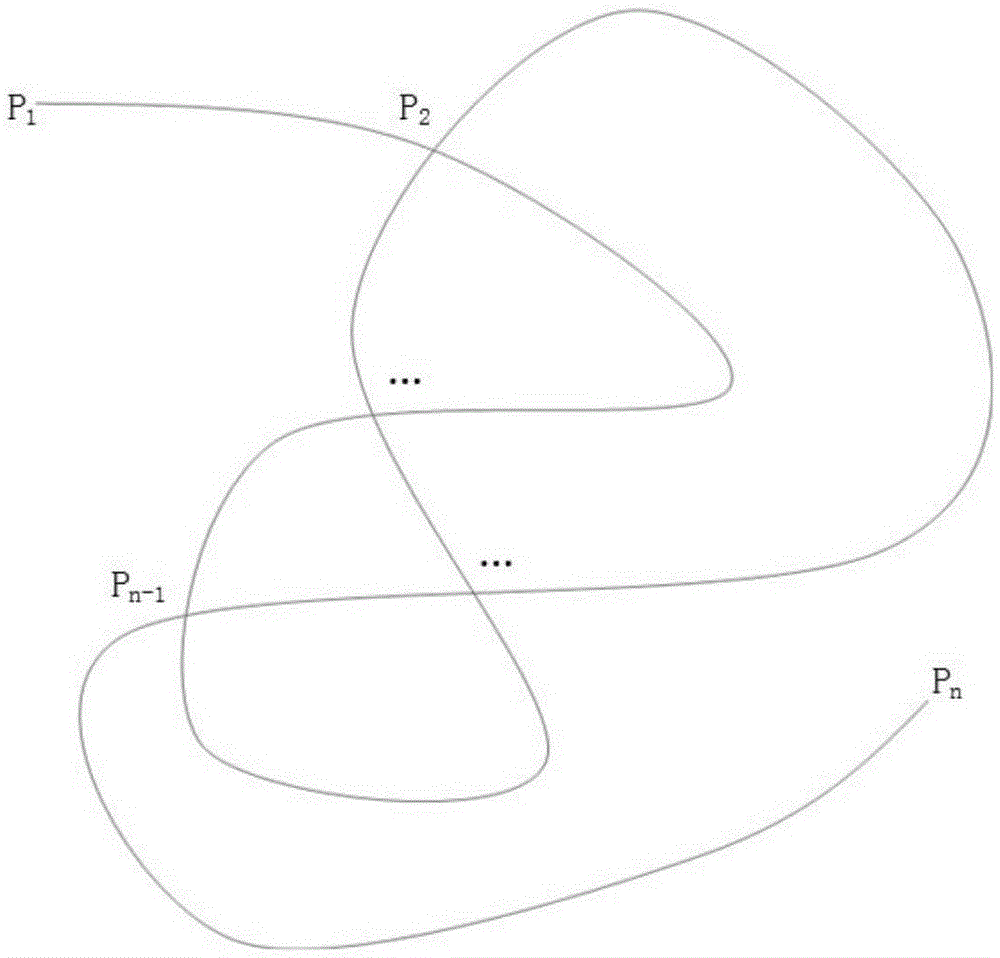
[0030] Such as figure 1 Shown: An automatic return path planning algorithm for UAVs, including the following steps:
[0031] Step 1. Take the local plumb coordinate system with the origin at the take-off point and the X, Y, and Z axes pointing to the north, east, and ground respectively as the navigation coordinate system. During the normal flight of the UAV, record points at a fixed time interval ΔT Record the flight parameters of the UAV in the navigation coordinate system. The flight parameters include the real-time position and velocity vector of the UAV at each recording point.
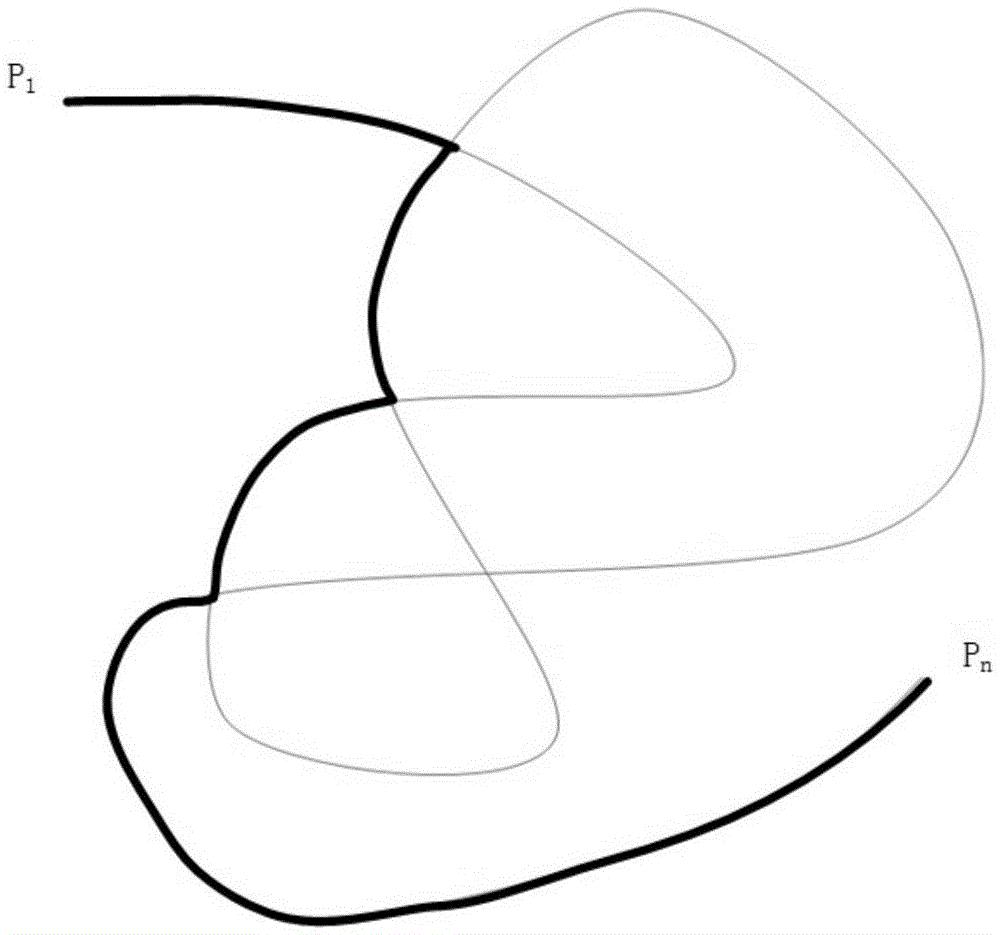
[0032] Step 2, the automatic return flight can be manually triggered by the user or automatically triggered by a component failure, low battery voltage or loss of the remote control signal, such as figure 1 As shown, after the automatic return flight is triggered, the flight parameters of any two recorded points are compared from the recorded flight parameters, so as to search for the intersecti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More