

Encoder and method of calculating rotational angle position
A rotation angle and encoder technology, which is applied to instruments, measuring devices, electrical devices, etc., can solve the problems of low rotation angle position accuracy, unable to fully reduce noise, etc., and achieve the effect of improving calculation accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
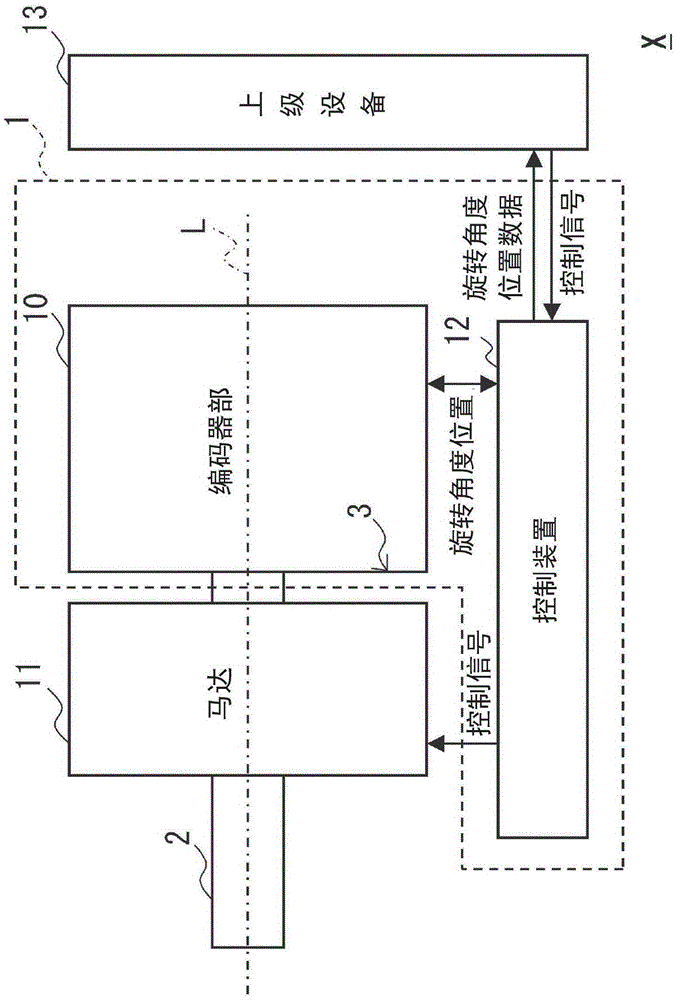
[0131] refer to figure 1 The configuration of the control system X according to the embodiment of the present invention will be described. The control system X has an encoder unit 10 , a motor 11 , a control device 12 , and host equipment 13 .
[0132] Among them, the encoder unit 10 and the control device 12 function as the encoder device 1 of the present embodiment.
[0133] The encoder unit 10 is an encoder capable of detecting a rotational angle position.
[0134] The encoder unit 10 always detects the angle of the rotating body 2 , such as a shaft having the same axis as the motor 11 , as rotation angle position data. Therefore, the encoder unit 10 has the fixed body 3 fixed to the frame of the motor 11 and the like.
[0135] The rotation angle position data includes data indicating the number of rotations of the rotating body 2 , data indicating the number of rotations of the rotating body 2 , and data indicating the angle of the rotating body 2 within one rotation. ...
Embodiment
[0348] Next, refer to Figure 9A , Figure 9B , an example of correcting the output of the encoder unit 10 in the circuit configuration of the present embodiment by the signal processing unit 100 will be described. In addition, the following Examples do not limit this invention.
[0349] Driven by other devices, the motor was rotated at a rotational speed of 5859 rpm, and the values of the A-phase signal (sin) and the B-phase signal (cos) were obtained simultaneously with a period of 80 μs as the sampling period T. The angle error is calculated from the acquired Lissajous patterns of the A-phase signal and the B-phase signal. The SIN wave of one period is superimposed on the waveform of the Lissajous pattern, and the error is calculated again.
[0350] Then, the phase and amplitude of the superimposed waveform are changed, and the value with the smallest error is calculated as the generated voltage of the induced voltage.
[0351] Figure 9A As a comparative example, it...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More