

Remote real person simulation interaction robot
A remote interaction and robotics technology, applied in manipulators, manufacturing tools, etc., can solve problems such as the inability to realize real-time real-time interaction of robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The specific implementation manner of the present invention will be described in detail below in conjunction with the accompanying drawings.
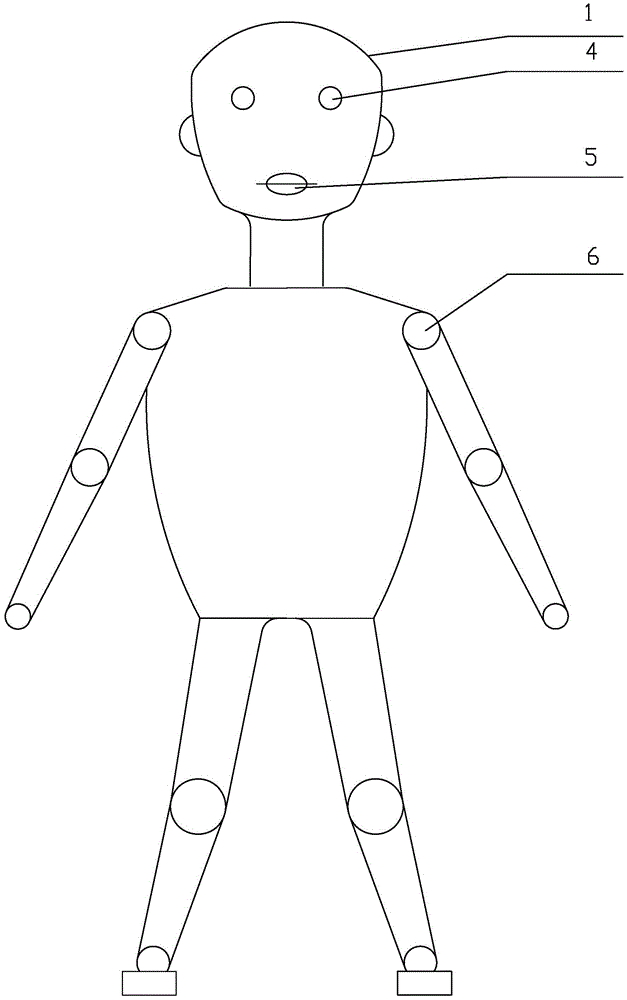
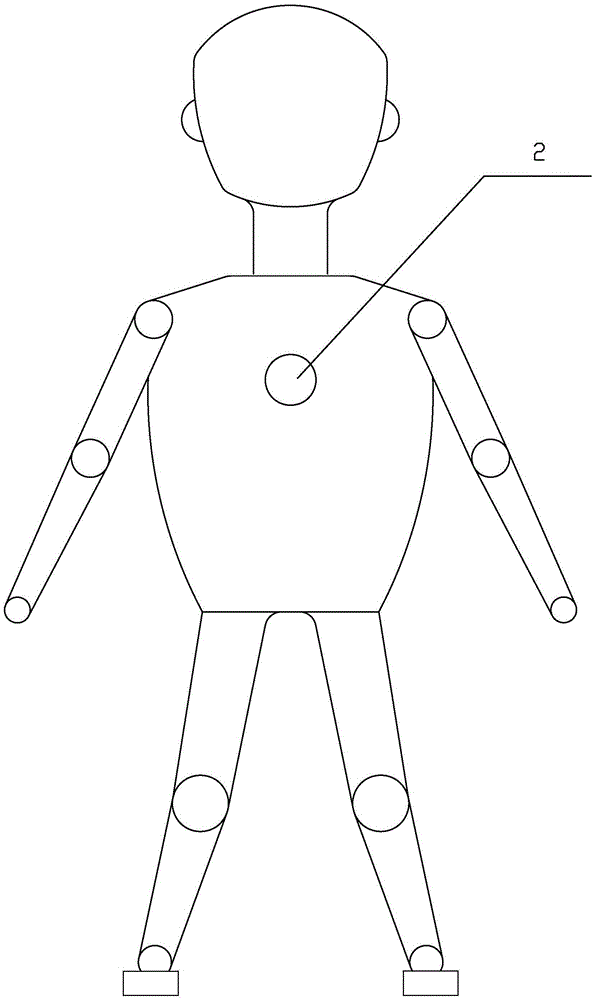
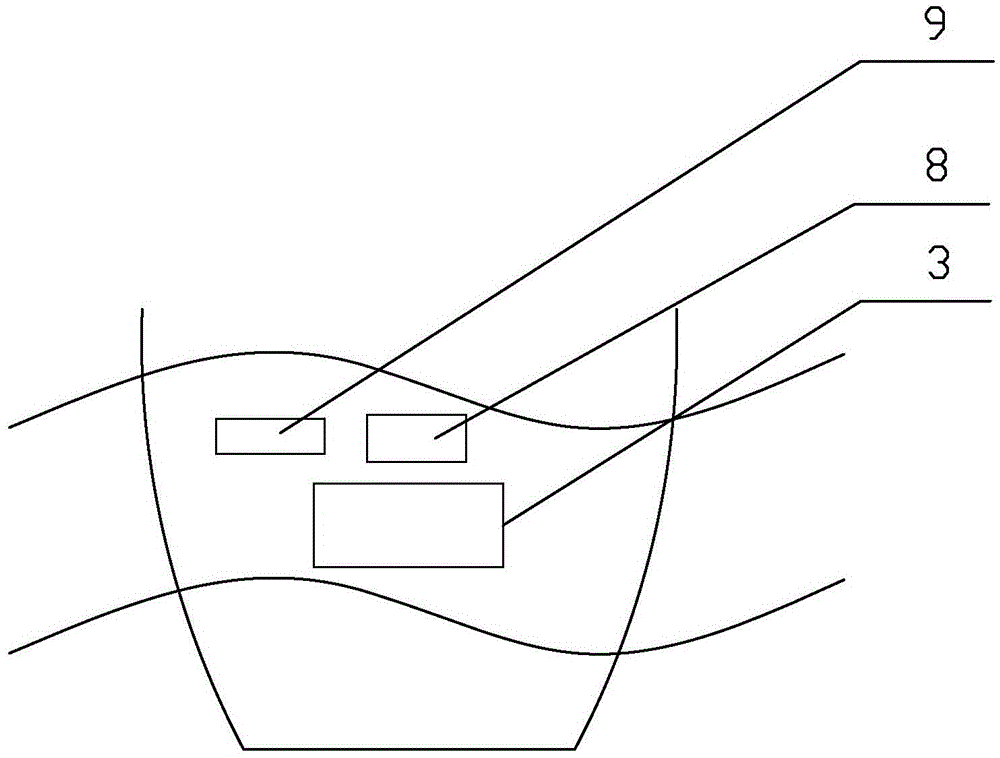
[0022] Such as figure 1 , figure 2 , image 3 , Figure 4 and Figure 5 As shown, one of the embodiments of the present invention includes an anthropomorphic fuselage 1, and a signal transceiver 2 for receiving work orders and sending operation information is arranged on the back of the anthropomorphic fuselage 1, and the signal transceiver 2 is connected to the abdomen of the fuselage 1. The computer processor 3 inside is connected, bidirectionally receives and transmits work information, and the computer processor 3 is respectively connected with the recording device 4 arranged on the eyes of the fuselage 1, the playback device 5 arranged at the mouth and including the recording device 5 arranged on the body. 1 is connected to the movable device 6 used to simulate the facial features, head, neck, trunk and limbs of the cor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More