Enhanced robot workbench based on multiple depth cameras
A robot workbench and depth camera technology, applied in the direction of instruments, manipulators, manufacturing tools, etc., can solve the problems of not being able to obtain the robot environment, affecting the accuracy of three-dimensional coordinates, affecting object matching, etc., to reduce the area, improve efficiency, and enhance vision perceived effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to describe the present invention more specifically, the technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
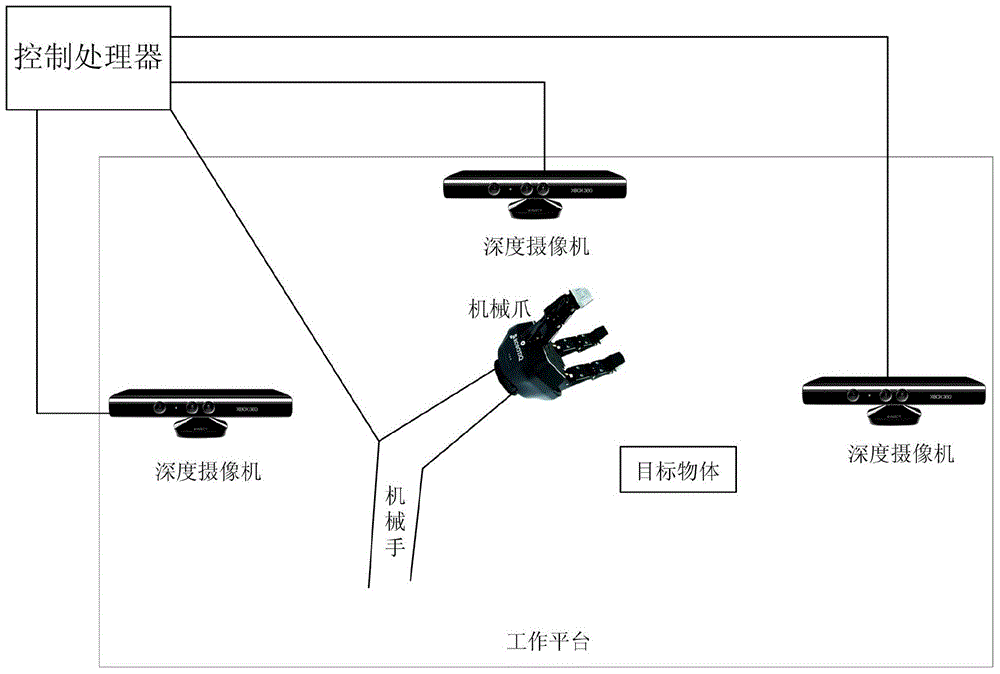
[0028] Such as figure 1 As shown, the present invention is based on a multi-depth camera enhanced robot workbench, including multiple depth cameras, a work platform, a manipulator, a mechanical claw and a control processor, wherein:
[0029] Multiple depth cameras are fixed around the robot, taking three as an example, located at the front and left and right sides respectively, and the depth cameras are used to collect image information of the robot's surrounding environment in real time.
[0030] The control processor recognizes the target object according to the image collected by the depth camera, converts its three-dimensional coordinates in the camera coordinate system into three-dimensional coordinates in the robot coordinate system, and then contro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More