AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A robot, water, land and air technology, applied in the field of robots, can solve problems such as the device is not compact enough, does not have perches and walls, and reduces the flexibility of the robot
Inactive Publication Date: 2017-08-11
JILIN UNIV
View PDF4 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
But it cannot realize the function of climbing walls, which reduces the flexibility of the robot
Patent 201510066785.7 discloses a flying wall-climbing robot. In addition to the functions of flying and perching on walls, the robot also has wall-climbing functions, but its flexibility, stability and concealment are poor when climbing walls.
Patent 200910079365.7 discloses a multi-rotor leg-wheeled multifunctional aerial robot. The robot has the ability to fly and climb walls, but it does not have the function of perching and walls. It also has the same flexibility, stability and concealment when climbing walls. poor
Patent 201520649047.0 discloses a four-axis two-body vehicle for land, sea and air. The robot has the functions of flying, walking on the ground and walking on the water, but it needs additional motors when walking on the water and land, and the device is not compact enough
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
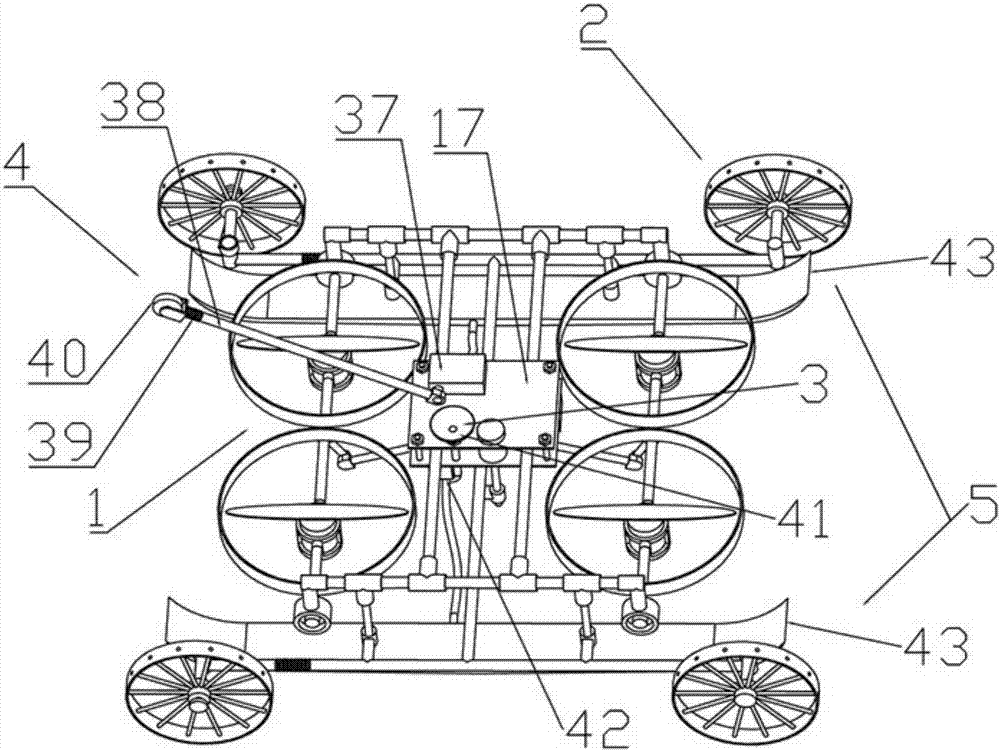
[0073] see figure 1 , figure 2 , image 3 , Figure 4 with Figure 5 Shown:
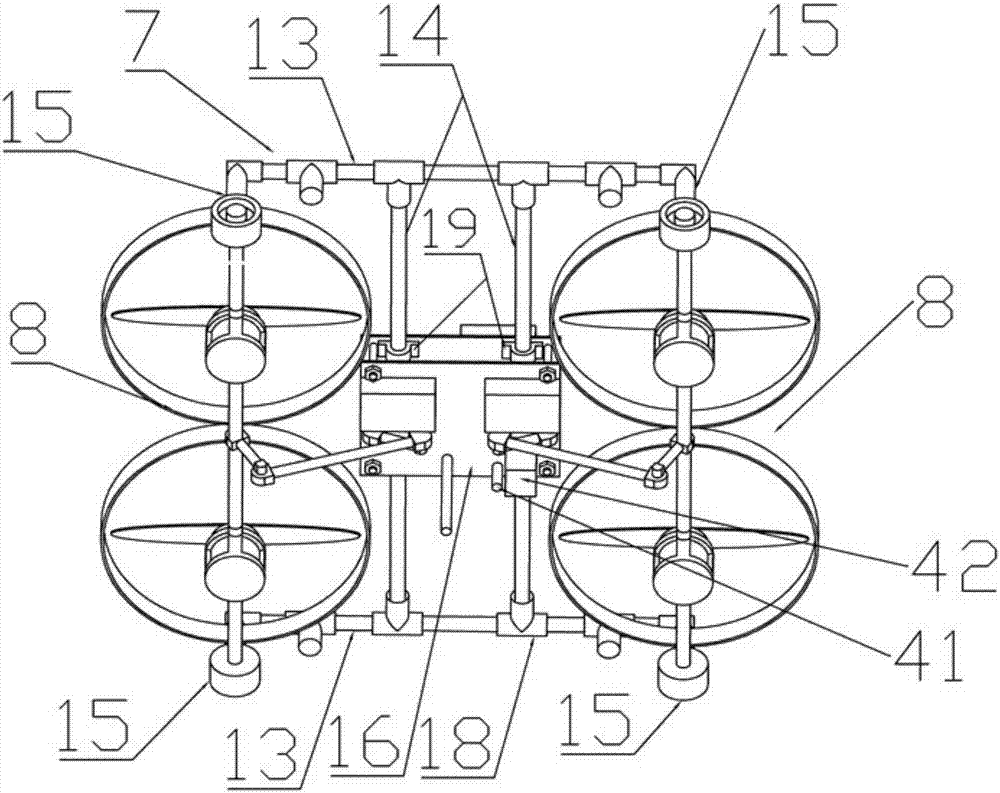
[0074]The water, land and air wall four-dwelling robot provided by the present invention includes a flight system 1, a wall-climbing walking system 2, an adsorption system 3, a support system 4, a floating system 5 and a control system 6, wherein the flight system 1 is the main body of the robot, and the adsorption system 3 and the support system 4 are installed on the top of the flight system 1, the wall-climbing system 2 is connected to the lower part of the flight system 1, the floating system 5 is installed at the bottom of the wall-climbing system 2, and the control system 6 controls the flight system 1, the wall-climbing system 2, the adsorption The work of the system 3, the supporting system 4 and the floating system 5 realizes the overall control of the robot.
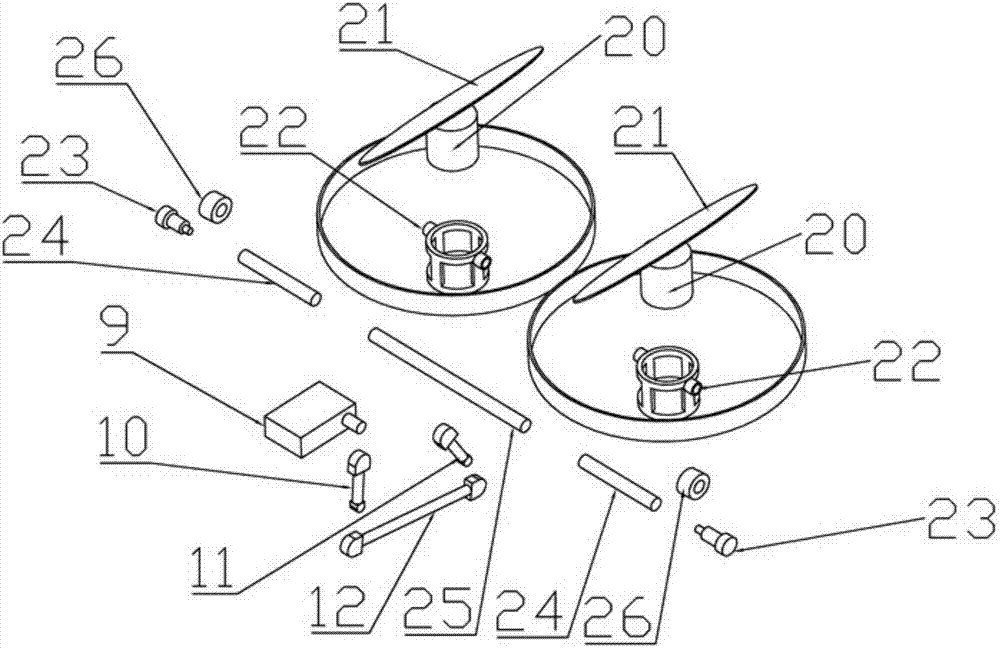
[0075] The flight system 1 includes a frame 7, a rotatable motor assembly 8, a first steering gear 9, a first rocker 10, a sec...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a water, land, air and wall type quadruple robot. The water, land, air and wall type quadruple robot comprises a flight system, a wall climbing walking system, an absorbing system, a support system, a floating system and a control system, wherein the flight system is a main body of the robot; the absorbing system and the support system are arranged at the top part of the flight system; the wall climbing walking system is connected with the lower part of the flight system; the floating system is arranged at the bottom part of the wall climbing walking system; the control system is used for controlling the working of the flight system, the wall climbing walking system, the absorbing system, the support system and the floating system to wholly control the robot. The water, land, air and wall type quadruple robot has the beneficial effects that the functions of flight, wall climbing, walking on ground, walking on water, and resting on wall are realized by the cooperation of the flight system, the wall climbing walking system, the absorbing system, the support system and the floating system through the robot, and can be freely switched; the device structure is greatly simplified, the total weight of the robot is reduced, the whole device is more compact, and the climbing capability is stronger.
Description
technical field [0001] The invention relates to a robot, in particular to a water, land, air and wall four-dwelling robot. Background technique [0002] In recent years, with the development of society, there are more and more applications of robots, such as for investigation, rescue, and special operations. Common robots include flying robots, wall-climbing robots, ground-walking robots, and water-walking robots. However, traditional flying robots have short battery life and poor concealment during detection; wall-climbing robots move slowly and have poor ability to overcome obstacles. In this regard, patent 201110322551.6 discloses a robot with two functions of flying and adsorption. The robot uses a quadrotor as the main body. The robot has the ability to inhabit the wall surface through the adsorption device. The adsorption power is much smaller than the flight power. Detection time is greatly increased. But it cannot realize the function of climbing the wall, which r...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More