

Modular flight wall-climbing robot
A wall-climbing robot, modular technology, applied in the field of robotics, to achieve the effects of extended working hours, improved flexibility, and improved concealment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
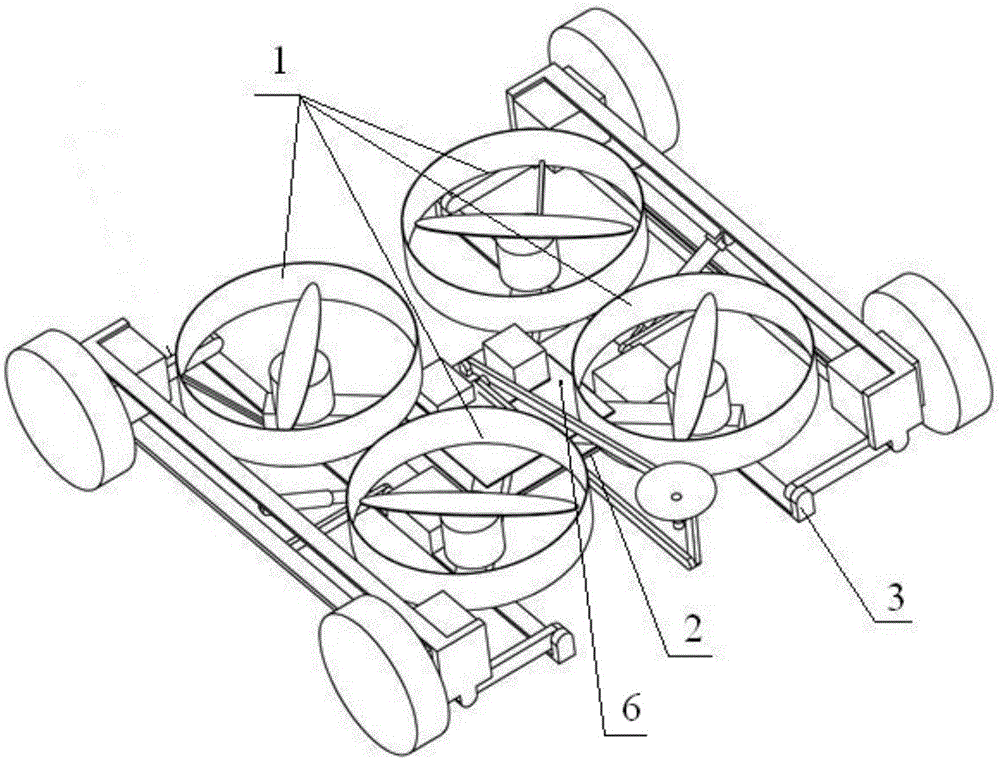
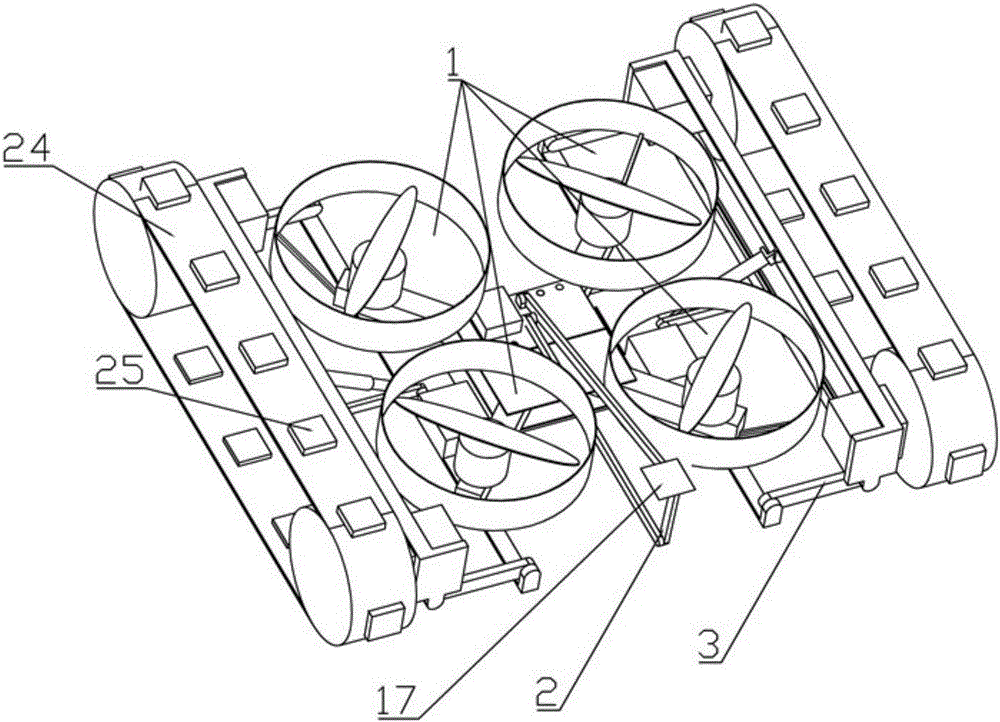
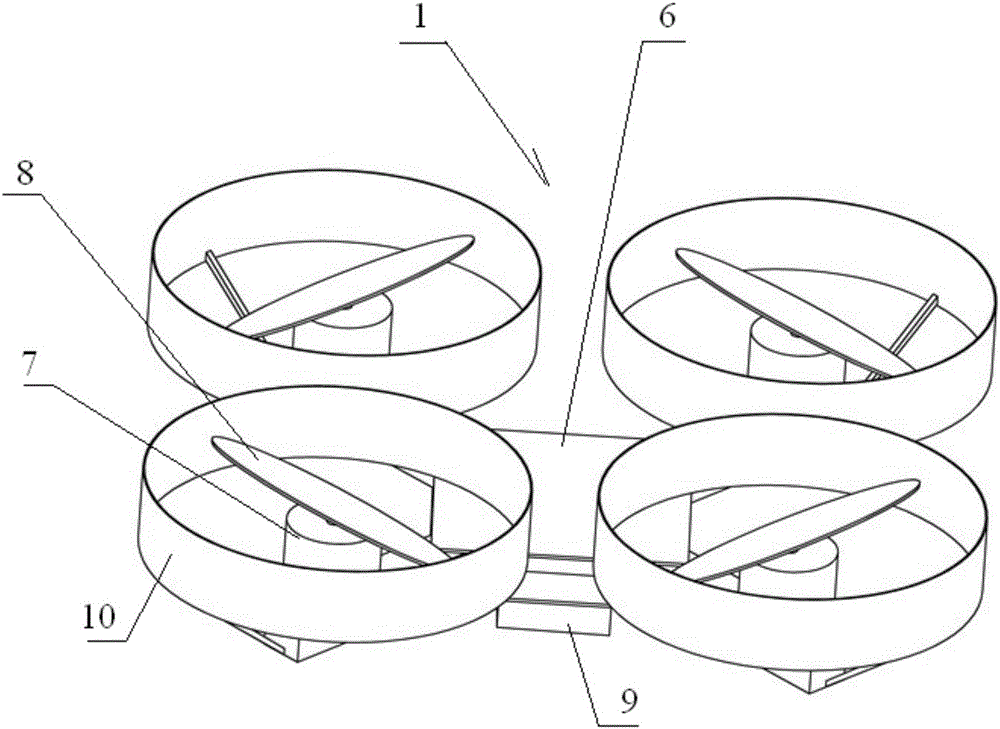
[0054] see figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 and Figure 6 Shown:
[0055] The modularized flying wall-climbing robot provided by the present invention includes a flight module 1, an adsorption module 2, a wall-climbing walking module 3 and a control module 4, wherein the wall-climbing walking module 3 and the adsorption module 2 are arranged on the frame 6 of the flying module 1 , the flight module 1, the adsorption module 2 and the wall-climbing walking module 3 are all controlled by the control module 4.
[0056] The flight module 1 includes a frame 6, a brushless motor 7, a propeller 8 and a lithium battery 9, wherein there are four propellers 8 distributed around the frame 6, and the circumference of each propeller 8 is provided with a protective cover 10. A brushless motor 7 is connected to the lower end of each propeller 8, and the brushless motor 7 is controlled by the control module 4. The lithium battery 9 is arranged at the bottom of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More