

Multi-UAV Cooperative Strike Task Allocation Method Based on Rolling Time Domain Method
A multi-UAV, rolling time domain technology, applied in non-electric variable control, instrument, adaptive control and other directions, can solve the problem of the ability of multi-UAV coordinated strike, the introduction of rolling time domain method, no consideration Problems such as the ability value of being attacked, to achieve the effect of improving the ability of multi-UAV coordinated strike, large target revenue value, and large damage efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
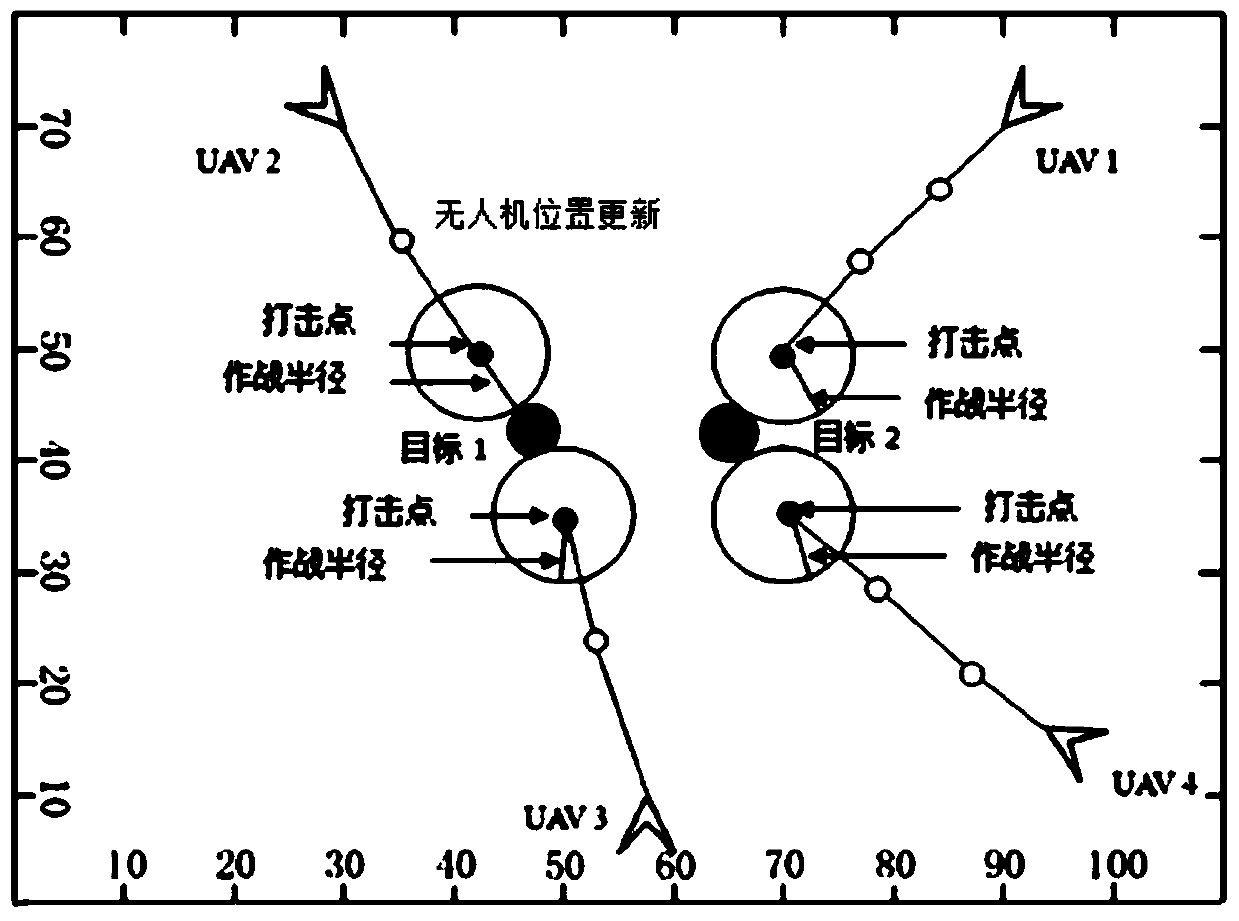
[0026] Step 1: Calculation of UAV capability function and cooperative strike range
[0027] Step 1.1 Establishment of UAV capability function
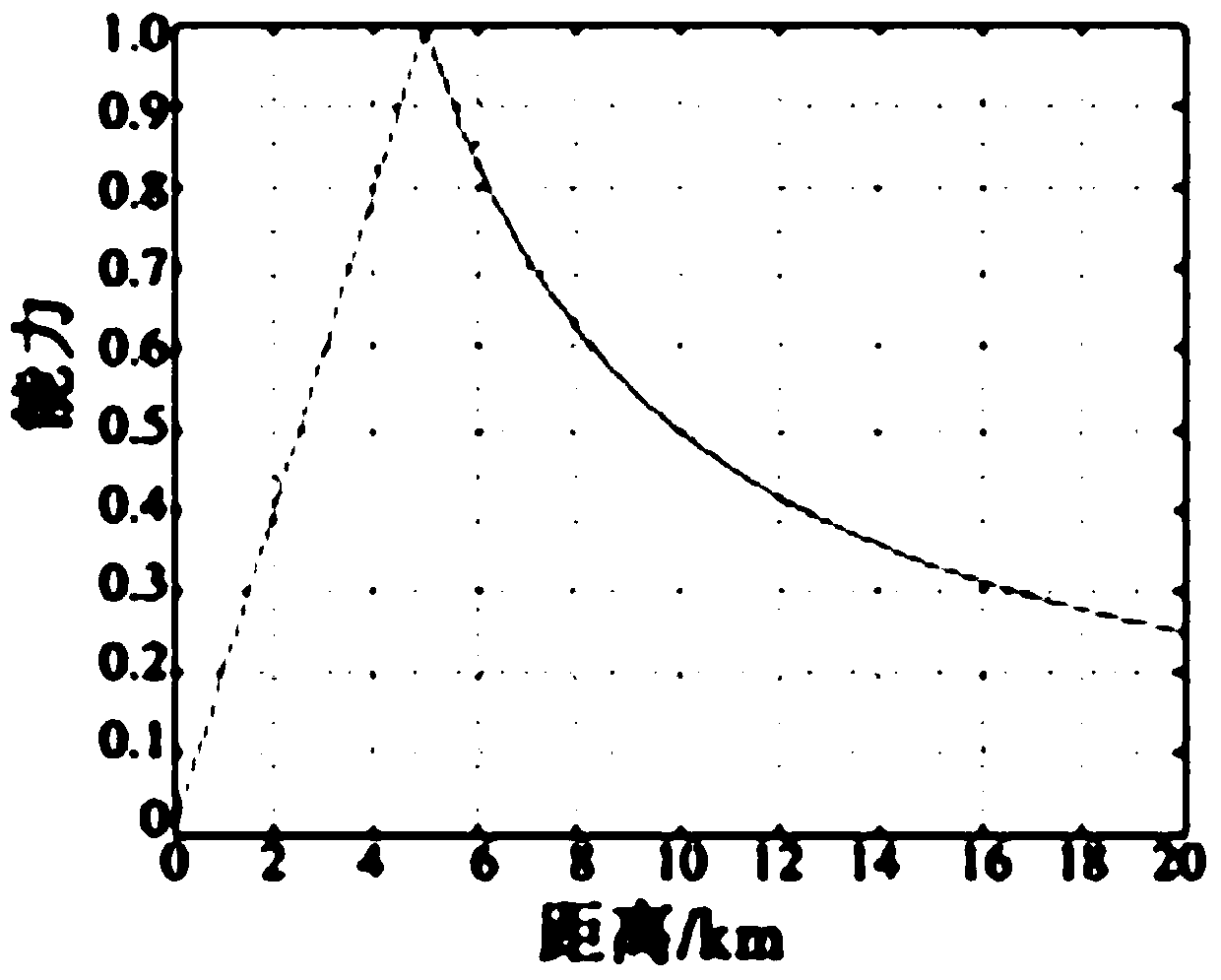
[0028] The capability function is to reflect the ability of the UAV to strike the target, and it is mainly established according to the requirements and forms of the mission. The capability function is related to factors such as the distance and orientation between the UAV and the target. The capability function of multiple UAVs is the sum of the capability functions of single UAVs. In order to simplify the analysis, it is assumed that the capability function only considers the distance from the target point. When the distance between the UAV and the target point meets the requirements, the UAV can achieve the maximum capability value.
[0029] The location information of UAVs is stored in an n×3 matrix, where n represents the number of UAVs. Target point information is stored in an m×3 matrix, where m represents the number of targe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More