Unmanned aerial vehicle control method and system based on touch induction interactions
A technology of touch sensing and control system, applied in three-dimensional position/channel control and other directions, it can solve the problems of not pulling and taking, and the drone is dropped and damaged, and achieves the effect of good control experience and fun.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The method and system for controlling a UAV based on touch-sensing interaction according to the present invention will be further described below in conjunction with the drawings and embodiments.
[0029] The following are the best examples described in the present invention, which do not limit the protection scope of the present invention.
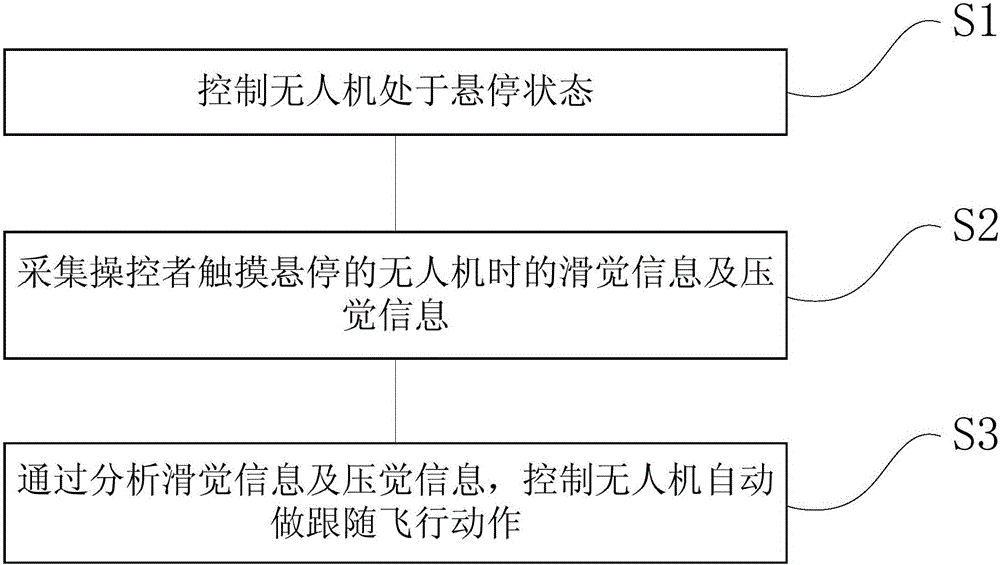
[0030] figure 1 A method for controlling a drone based on touch-sensitive interaction according to the present invention is shown, including the following steps:
[0031] S1. Control the UAV to be in a hovering state;
[0032] S2. Collect the slip information and pressure information when the operator touches the hovering drone;
[0033] S3. By analyzing the slip information and pressure information, the UAV is controlled to automatically follow the flight action.
[0034] Preferably, in the step S2, the gliding information includes the sliding degree and sliding direction when the operator touches the drone, and the pressure in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More