

Four-degree-of-freedom hybrid high-frequency mechanical foot for humanoid robot
A technology of humanoid robot and degree of freedom, which is applied in the field of humanoid robot, can solve the problems of less freedom of movement, low frequency of dynamic response, loss of meaning of human imitation, etc., and achieve high-frequency characteristics, reasonable structure, and detailed imitation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
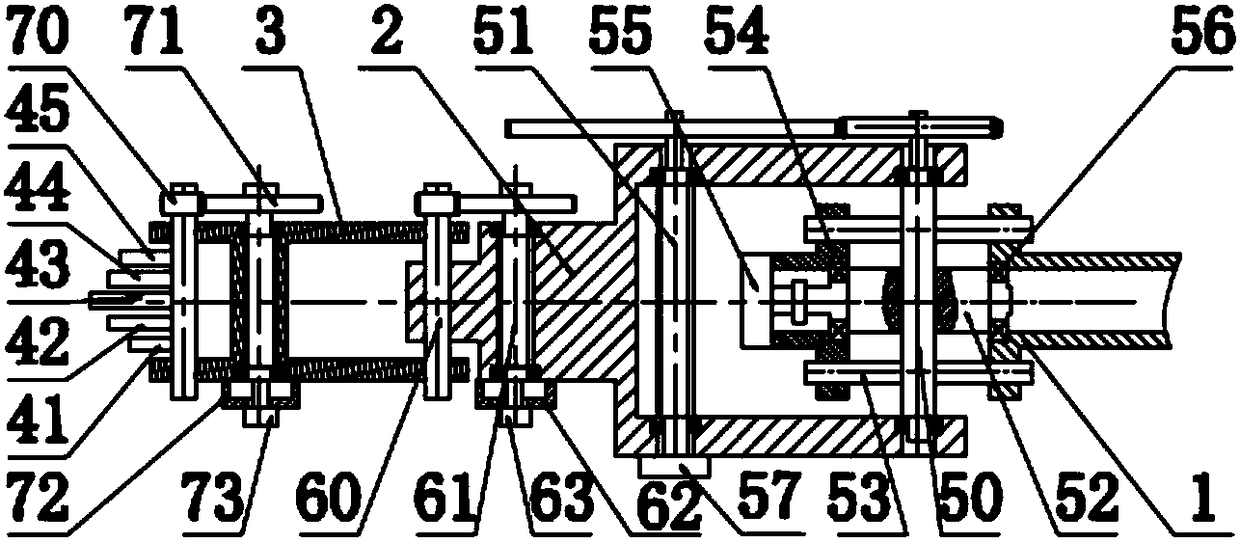
[0014] see figure 1 As shown, the four-degree-of-freedom hybrid high-frequency mechanical foot of the humanoid robot of the present invention includes a mechanical lower leg 1, a tarsal frame 2, a metatarsal frame 3, parallel toes, an ankle joint, a tarsal metatarsal joint, and a metatarsophalangeal joint; the mechanical lower leg 1 passes through The ankle joint is installed on the right end of the tarsal frame 2, the left end of the tarsal frame 2 is connected with the right end of the metatarsal frame 3 through the tarsal-metatarsal joint, and the left end of the metatarsal frame 3 is connected with the parallel toes through the metatarsophalangeal joint; The big toe 41 on the pinion shaft 70, the second big toe 42, the third big toe 43, the fourth big toe 44 and the little big toe 45.
[0015] see figure 1 As shown, the metatars...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More