Simulation robot
A technology for simulating robots and controllers, applied in the field of simulating robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
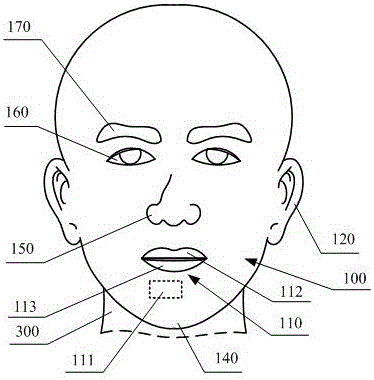
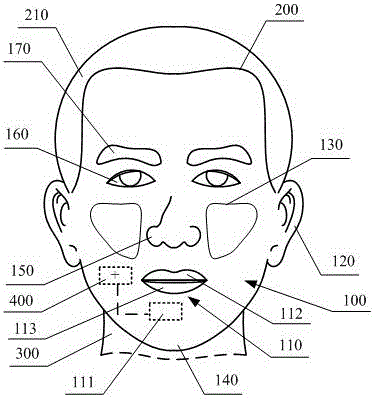
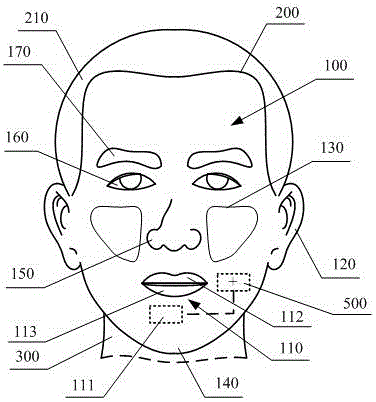
[0020] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. The following embodiments can be used in combination, and the present invention can be implemented in various forms, and is not limited to each specific embodiment described in this specification. These embodiments are provided. The purpose of the examples is to make the disclosure of the present invention more thorough and comprehensive to facilitate understanding. It should be further noted that when a certain structure is fixed to another structure, it includes directly or indirectly fixing the structure to the other structure, or fixing the structure to the other structure through one or more other intermediate structures. When a structure is connected to another structure, it includes directly or indirectly connecting the structure to the other structure, or connecting the structure to the other structure through one or more other intermedi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More