

A Monocular Vision Positioning Method for Underwater Robot
A technology of underwater robot and positioning method, which is applied in the directions of instruments, photogrammetry/video measurement, reflection/re-radiation of radio waves, etc. problem, to achieve the effect of expanding the scope of use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052]The embodiments of the present invention will be described in detail below. Examples of the embodiments are shown in the accompanying drawings. The embodiments described with reference to the accompanying drawings are exemplary and are intended to explain the present invention, but should not be construed as limiting the present invention. .
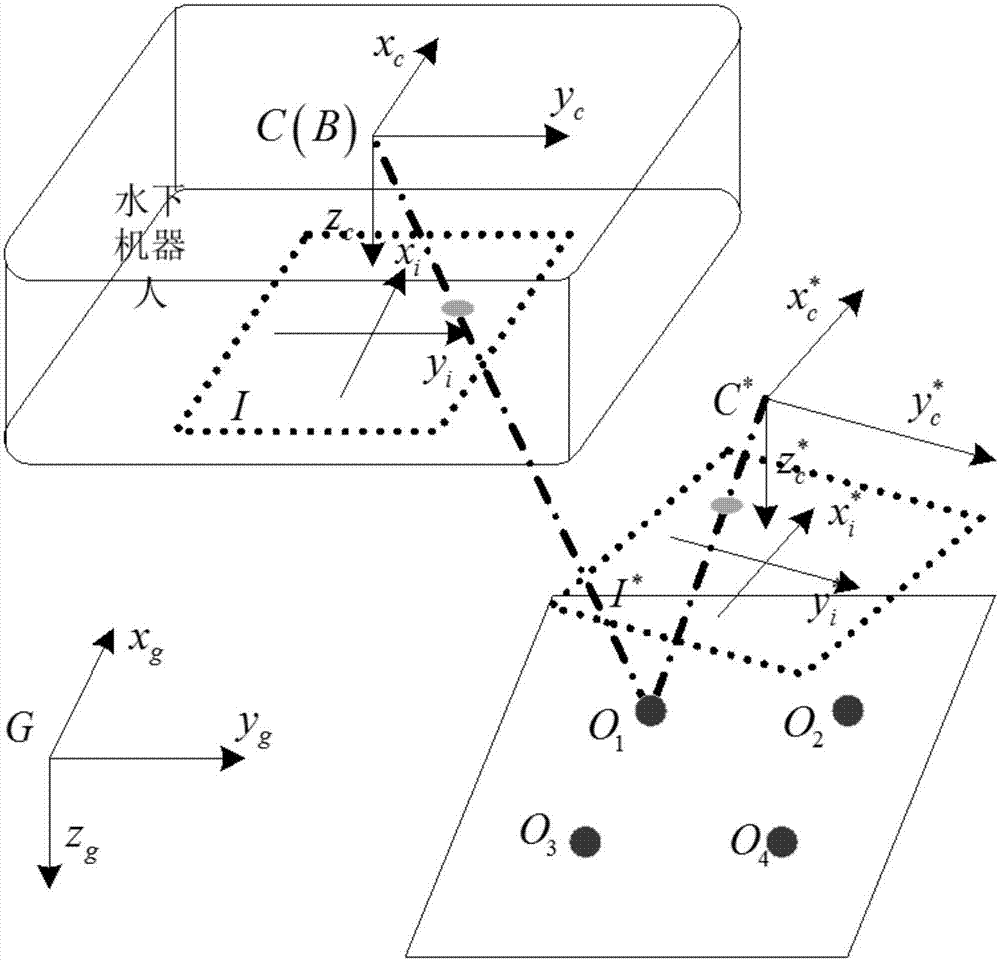
[0053] The principle of this embodiment based on the nonlinear Unscented Kalman Filter (UKF) method is to measure the linear velocity and angular velocity of the underwater robot under the carrier system according to the mathematical model of the underwater robot, combined with Doppler and gyroscope , obtain the state equation; take 4 static feature points whose coordinates are known in the global system, on the basis of the dynamic model of the underwater robot, through the change of the coordinate system, the position of the feature points in the image system under the known global system is obtained. , the measurement equation i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More