

Dispatching method and device for cleaning robot
A cleaning robot and scheduling method technology, applied in the field of cleaning robot scheduling method and scheduling device, can solve the problems of complex environment, large battery life, large cleaning area and the like
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0201] Taking the shopping mall as an example, assuming that the shopping mall is equipped with multiple monitoring devices, the shopping mall is divided into multiple cleaning areas according to the monitoring range of the monitoring devices. For each cleaning area, such as Figure 6 As shown, the scheduling method includes:
[0202] S601. From the last cleaning of the cleaning area, determine the cumulative flow of people in the cleaning area at the current moment according to the image of the cleaning area acquired by the corresponding monitoring device.
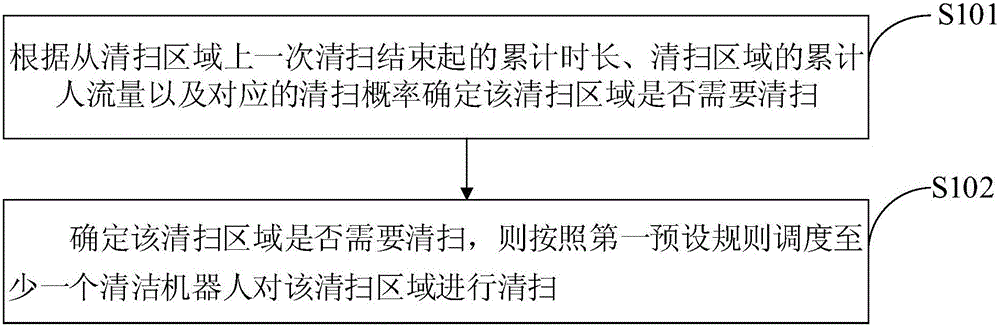
[0203] S602. Determine whether the cleaning area needs to be cleaned according to the cumulative time since the last cleaning in the cleaning area, the cumulative flow of people in the cleaning area, and the corresponding cleaning probability.
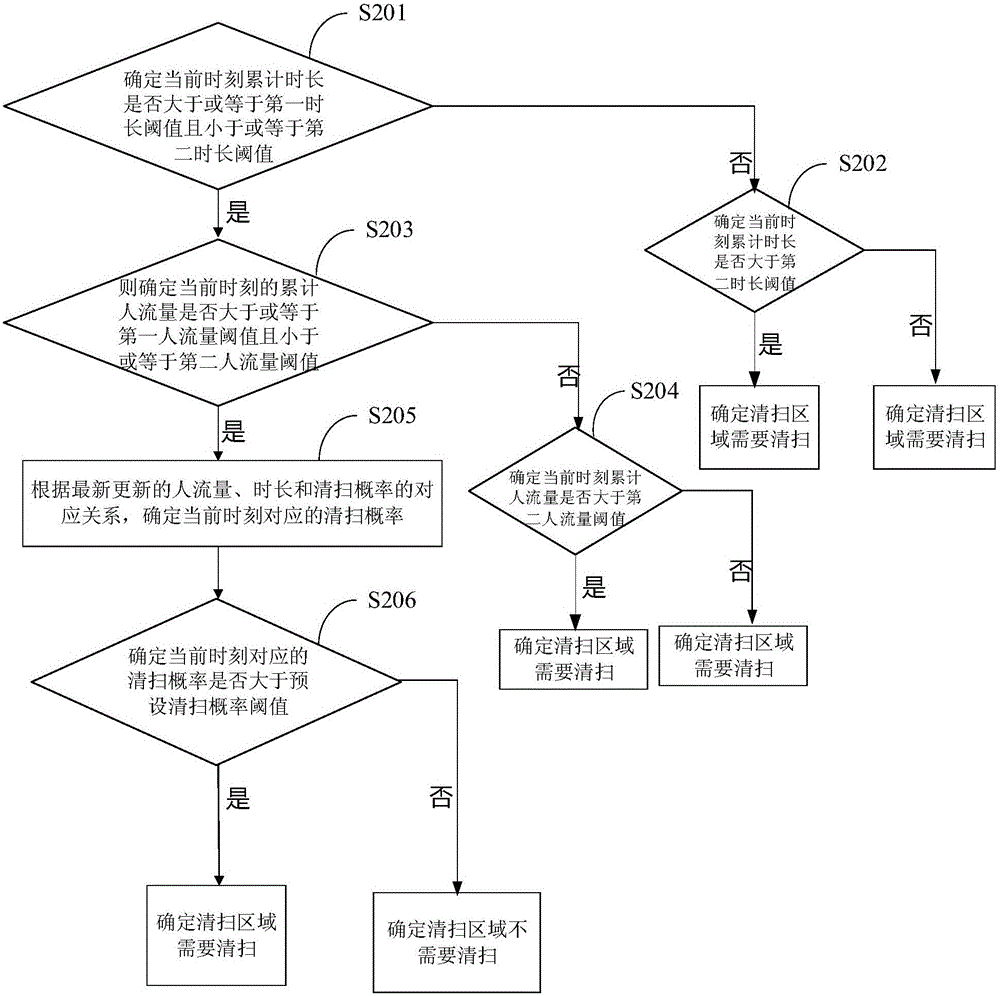
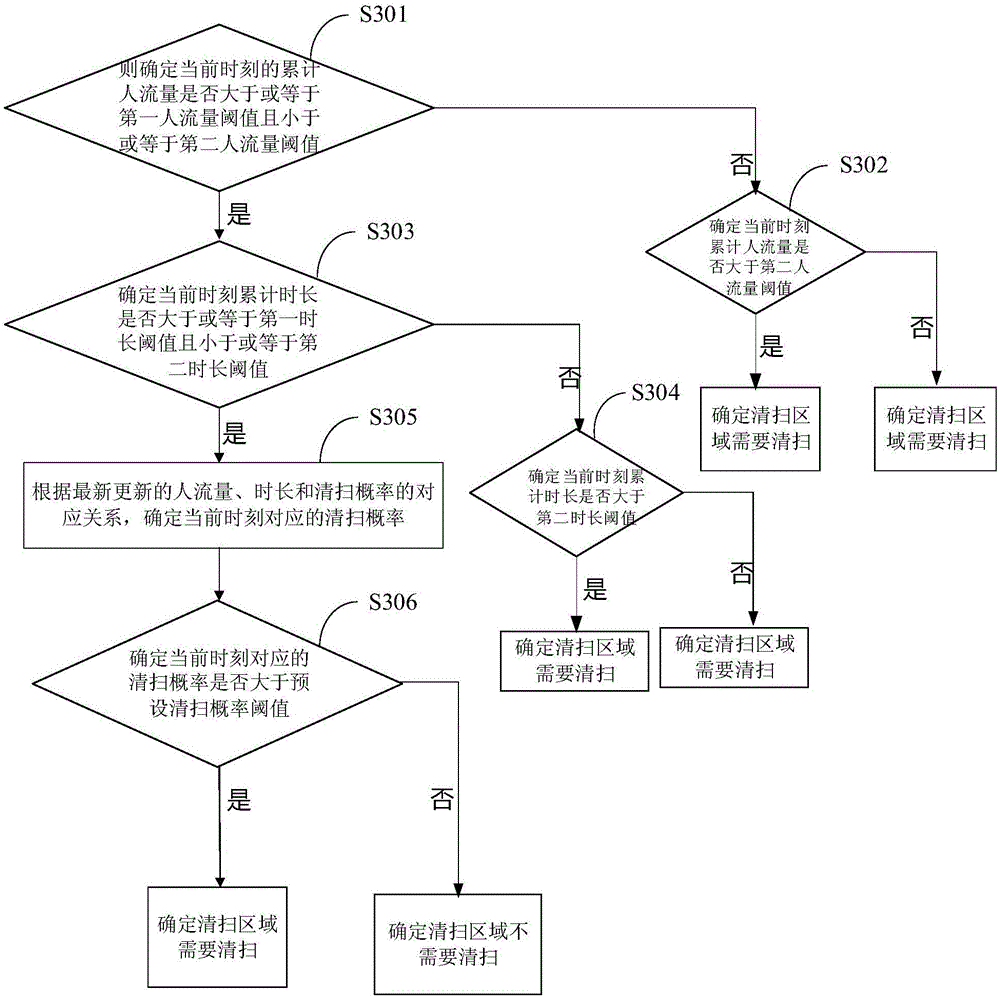
[0204] During specific implementation, step S602 is specifically:
[0205] When the cumulative flow of people at the current moment is less than the first threshold of the flow o...
Embodiment 2
[0234] Based on the same inventive concept, the embodiment of the present invention also provides a cleaning robot scheduling device, such as Figure 7 shown, including:
[0235] The judging unit 01 is used to determine whether the cleaning area needs to be cleaned according to the cumulative time since the last cleaning in the cleaning area, the cumulative flow of people in the cleaning area and the cleaning probability;
[0236] The scheduling unit 02 is configured to schedule at least one cleaning robot to clean the cleaning area according to a first preset rule when determining whether the cleaning area needs to be cleaned.
[0237] In the above scheduling device provided by the embodiment of the present invention, the judging unit determines whether the cleaning area needs to be cleaned according to the cumulative time since the last cleaning in the cleaning area, the cumulative flow of people in the cleaning area, and the corresponding cleaning probability, thereby repla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More