

A wheeled pipeline robot with controllable driving wheel steering
A pipeline robot and driving wheel technology, which is applied to special pipes, pipe components, mechanical equipment, etc., can solve problems such as weak obstacle avoidance ability, poor bending pipe passing ability, and difficult attitude adjustment, so as to achieve easy control and improve driving efficiency , the effect of accurate pipeline damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
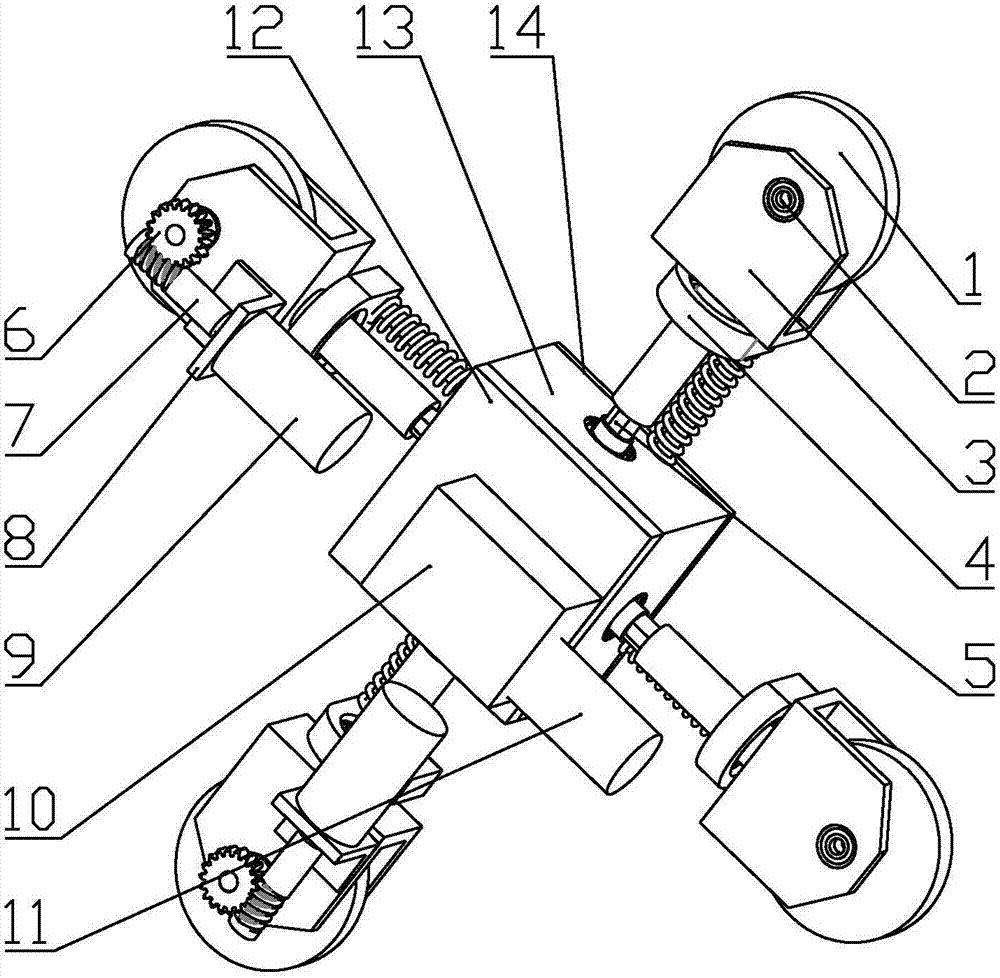
[0033] Such as figure 1 As shown, a wheeled pipeline robot with controllable driving wheel steering includes two forearm units, two rear arm units and a body, wherein the two forearm units and the two rear arm units are evenly distributed around the body to form a cross-shaped structure. The body is composed of a front box cover, a box body, a rear box cover and a steering wheel steering mechanism arranged inside the body. The front box cover is fixed on the front surface of the box body, and the rear box cover is fixed on the rear end surface of the box body. superior.
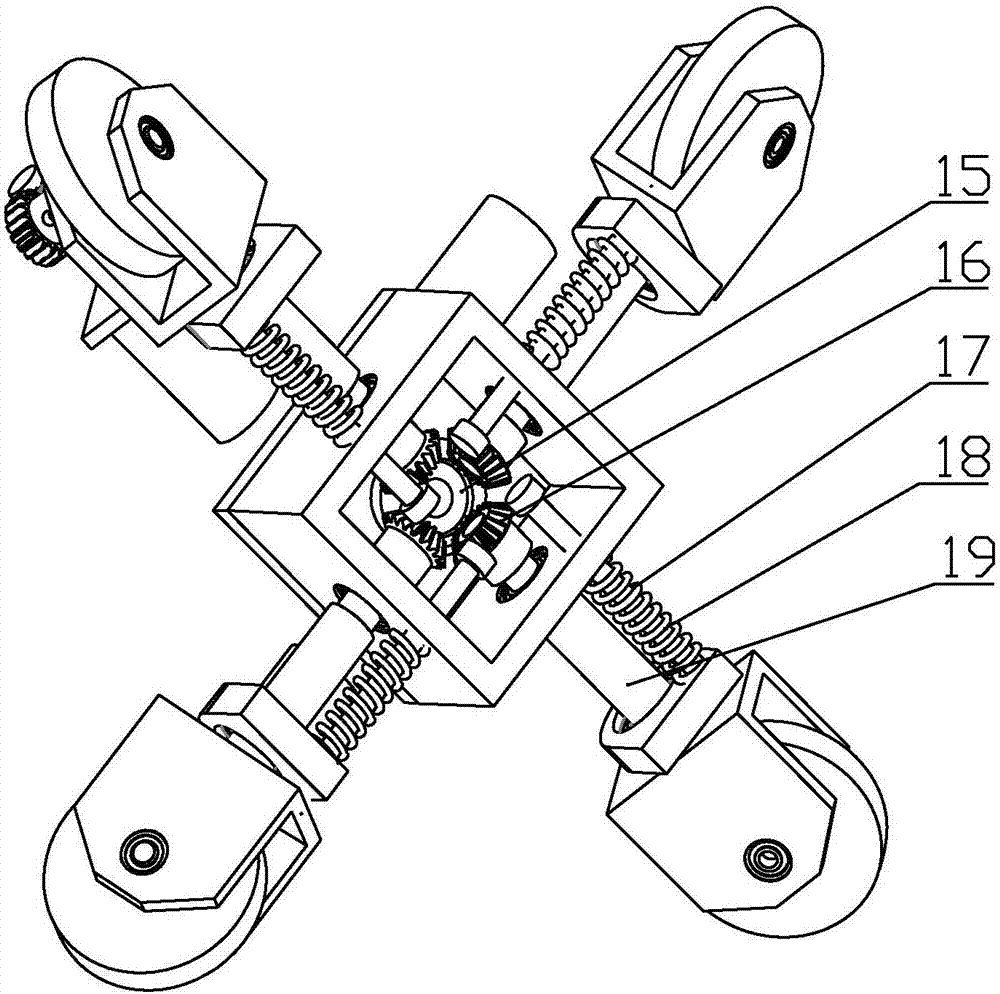
[0034] Such as figure 2 As shown, the driving wheel steering and changing mechanism is composed of a steering motor, a reduction box, a large bevel gear, four small bevel gears and four transmission shafts; the reduction box and the steering motor form a reduction motor and are arranged on the front cover; On the output shaft of the reduction box, there is a large bevel gear inside the box, and the large b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More