

A multi-degree-of-freedom manipulator for a substation fire rescue robot
A technology of rescue robots and degrees of freedom, applied in manipulators, manufacturing tools, etc., can solve the problems of reduced fire extinguishing efficiency and time for manual on-site fire fighting, threats to the personal safety of firefighters, and low overall efficiency of fire extinguishing, and achieve a wide range of fire extinguishing jets , Large fire extinguishing spray range and high fire extinguishing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
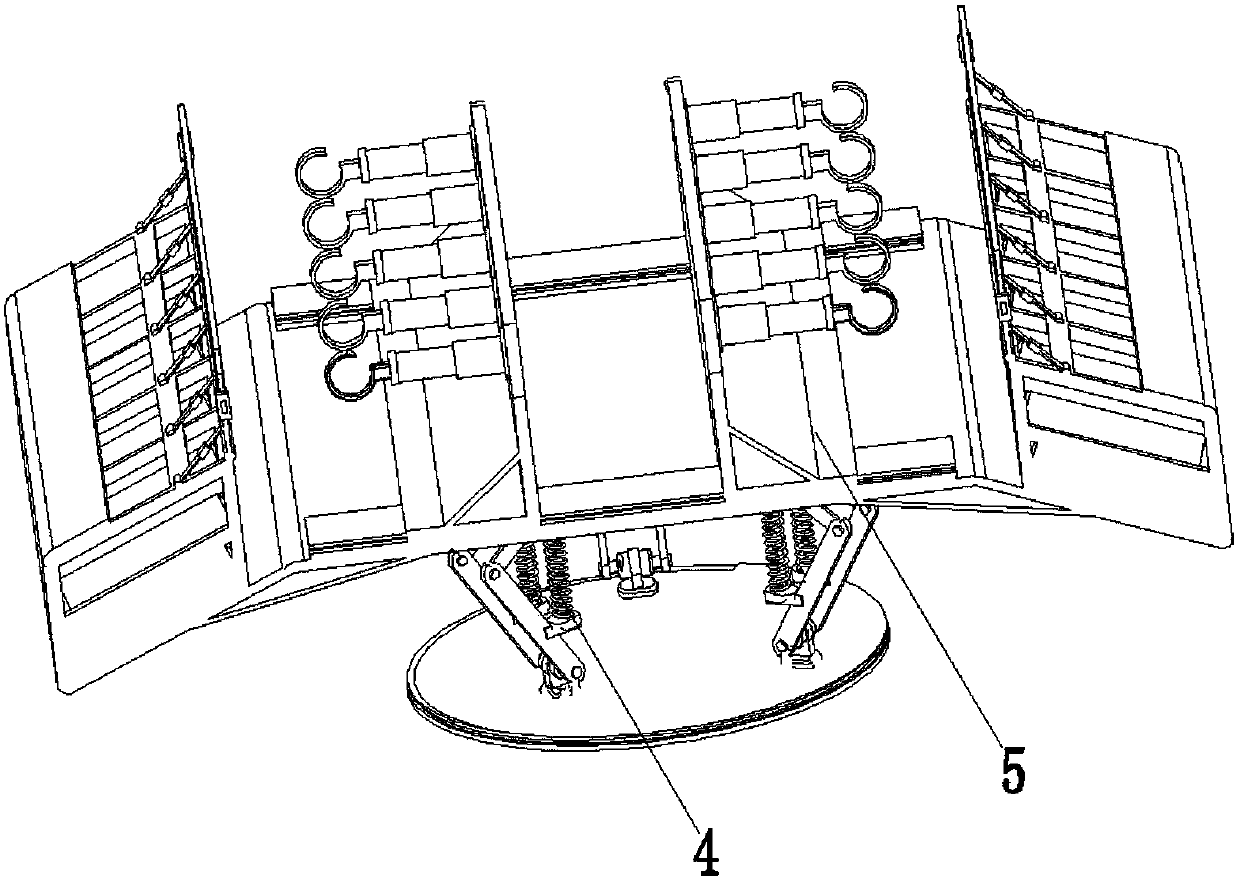
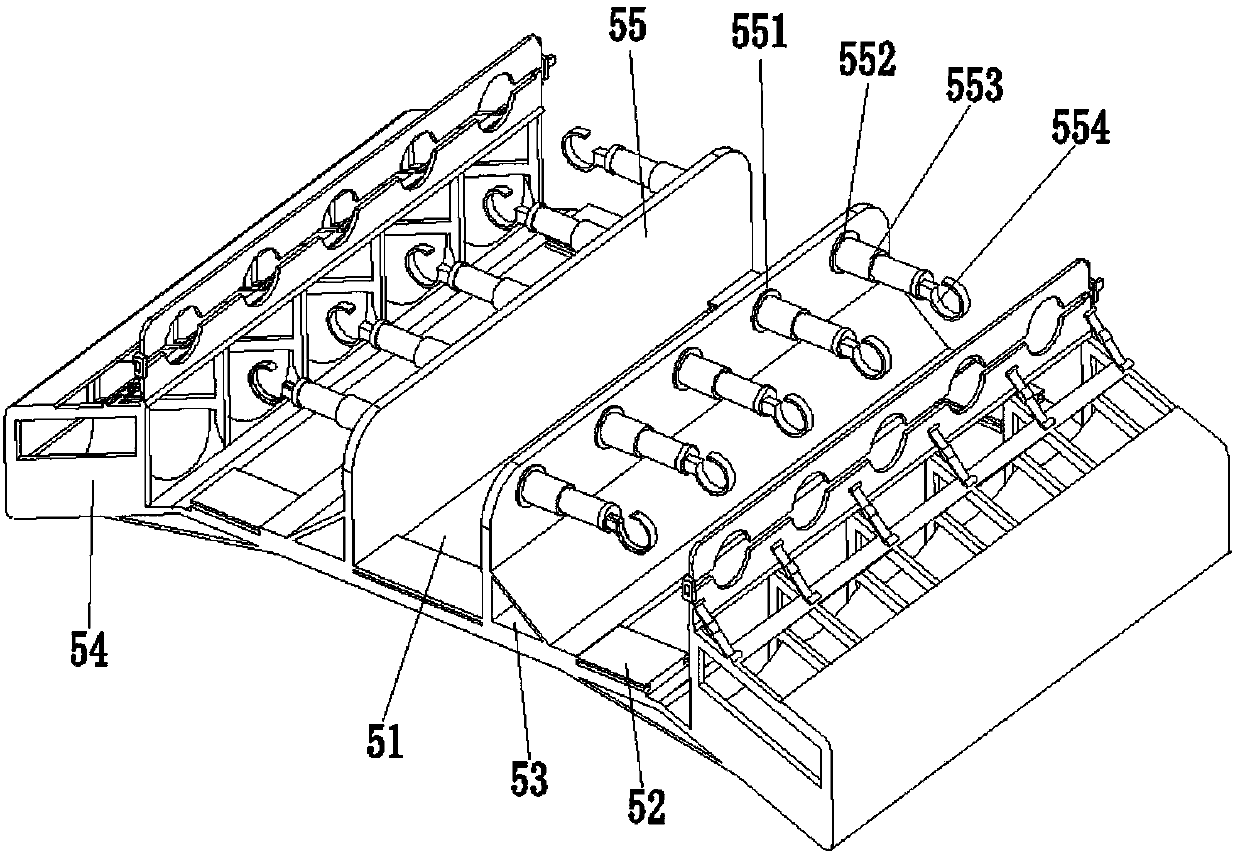
[0023] Such as Figure 1 to Figure 4 As shown, a multi-degree-of-freedom manipulator for a substation fire rescue robot includes a delta parallel mechanism 4 and a fire extinguishing device 5; connect.
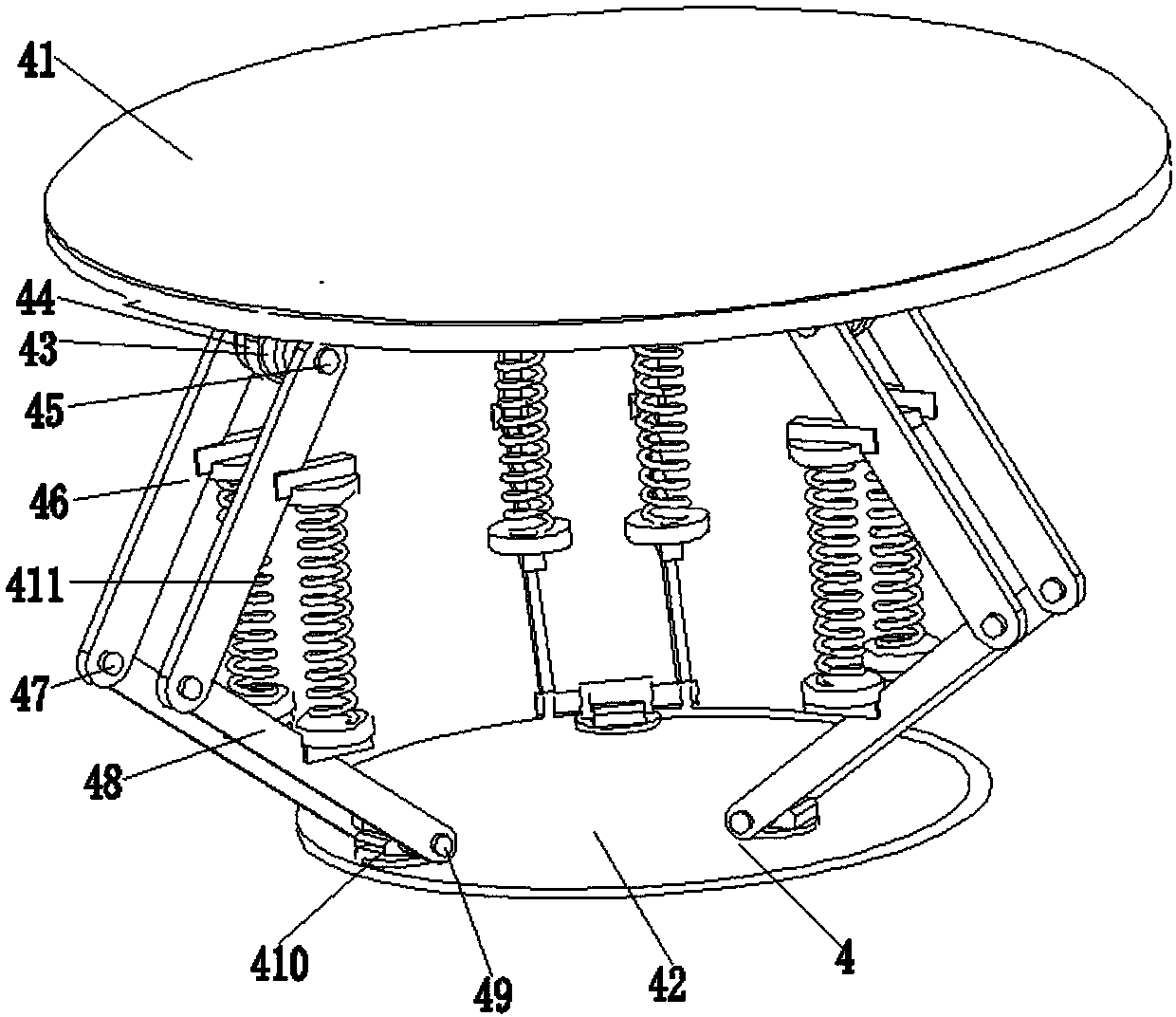
[0024] Such as figure 1 with figure 2As shown, the delta parallel mechanism 4 includes a fixed platform 41, a moving platform 42, a motor seat 43, a parallel motor 44, a first rotating shaft 45, a first connecting rod 46, a rotating pin 47, a second connecting rod 48, a second Rotating shaft 49, rotating base 410 and limit spring 411; Described fixed platform 41 and moving platform 42 are all in a circular shape structure, and moving platform 42 is positioned at fixed platform 41 directly above, and the quantity of motor base 43 and rotating...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More