

Route planning method and device for unmanned aerial vehicle
A drone and path technology, applied in the field of drones, can solve the problem of inapplicable precise planning of the path with the least collision probability between drones and obstacles, and achieve the effect of ensuring safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
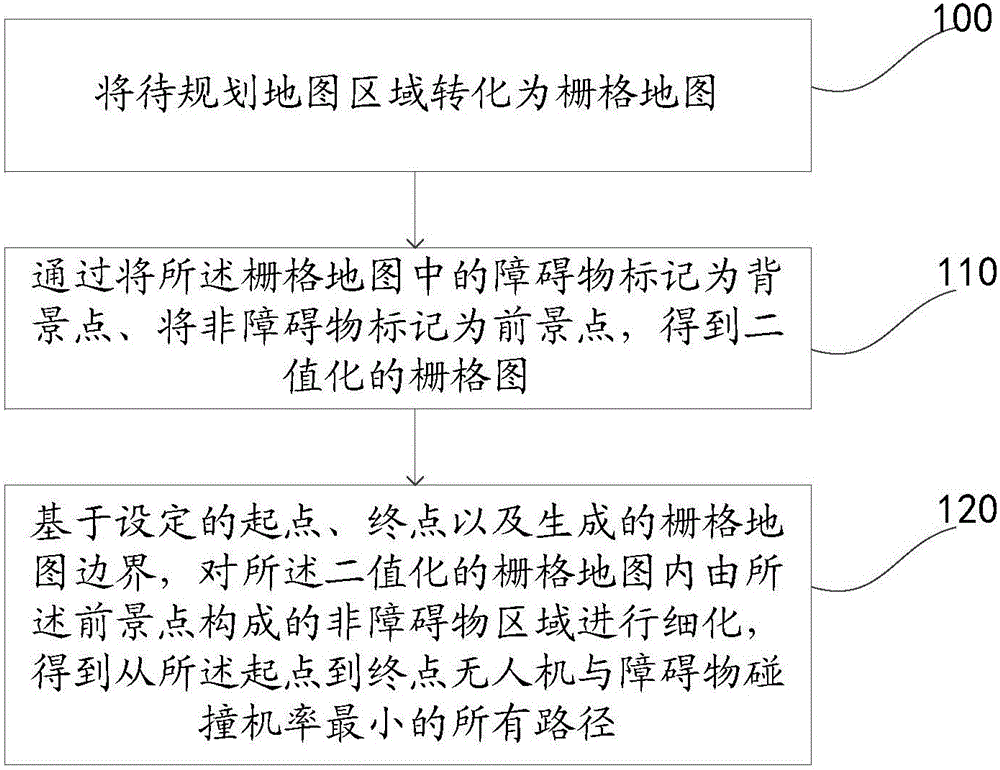
[0026] Such as figure 1 As shown, the embodiment of the present invention discloses a UAV path planning method, including: step 100 to step 120 .
[0027] Step 100, converting the map area to be planned into a grid map.
[0028] At present, most of the maps used for navigation are vector graphics, and the map contains a large amount of information, including: geographical location information and landform information. Vector graphics are lines, planes, and volumes drawn by a series of coordinates and functions, which can be zoomed indefinitely and have high definition. In the embodiment of the present invention, it is only necessary to know the topographical information of a certain geographical location, and it is not necessary to perform a zoom operation on the map. Therefore, a grid map may be used. And, pixel-based raster maps facilitate refinement.
[0029] During specific implementation, the UAV flight map data to be planned can be obtained by reading the electronic m...
Embodiment 2
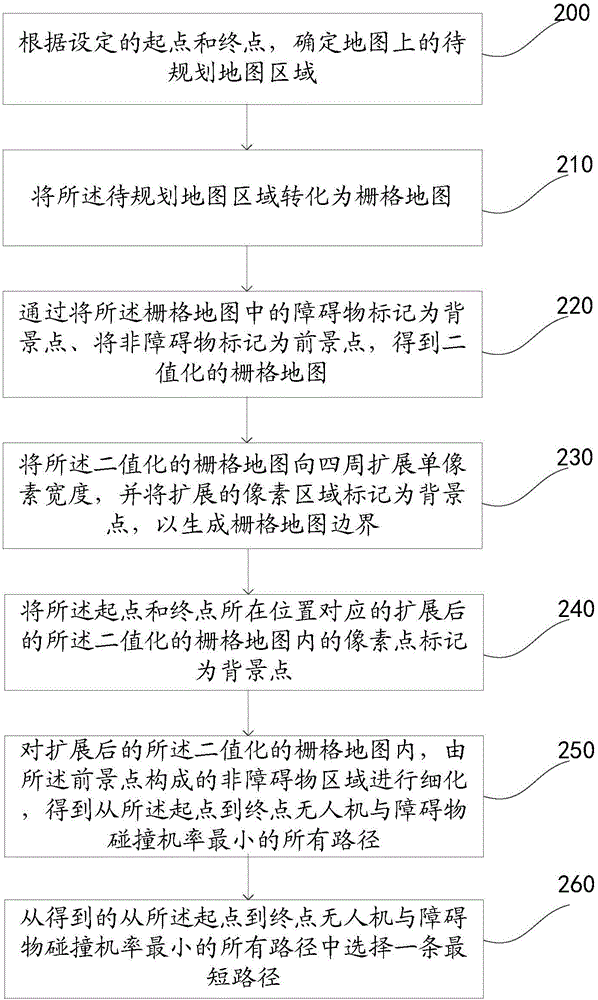
[0036] Such as figure 2 As shown, the embodiment of the present invention discloses a UAV path planning method, including: step 200 to step 260 .
[0037] Step 200, according to the set start point and end point, determine the map area to be planned on the map;
[0038] First, according to the starting point and the ending point of the set path, an area including the starting point and the ending point on the map used to plan the flight path, and the range is slightly larger than the range determined by the starting point and the ending point is used as the map area to be planned. For example, if the starting point is set to be Beijing and the end point is Tianjin, then only the map ranges of Hebei Province and Beijing City need to be selected as the map area to be planned. During specific implementation, a minimum circular or rectangular area including the starting point and end point can be determined according to the set starting point and end point, and then the circular...
Embodiment 3
[0076] Correspondingly, see Figure 8 , the present invention also discloses a UAV path planning device, comprising:
[0077] A rasterization module 800, configured to convert the map area to be planned into a raster map;
[0078] The binarization module 810 is used to obtain a binarized raster map by marking obstacles in the raster map obtained by the rasterization module 800 as background points and non-obstacles as foreground points;
[0079] The path refinement module 820 is configured to refine the non-obstacle area formed by the foreground points in the binarized grid map based on the set start point, end point and generated grid map boundary, to obtain All paths from the start point to the end point with the least probability of the UAV colliding with obstacles.
[0080] Optionally, as in Figure 9 As shown, the path refinement module 820 includes:
[0081] A condition setting unit 8201, configured to expand the binarized grid map to a single pixel width around, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More