

Wearable hand exoskeleton device
An exoskeleton and wearable technology, applied in the direction of manipulators, program-controlled manipulators, joints, etc., can solve the problems of exoskeleton mechanism complexity, increase mechanism inertia and weight, etc., to ensure movement flexibility, simplify mechanism design, and easy to use Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
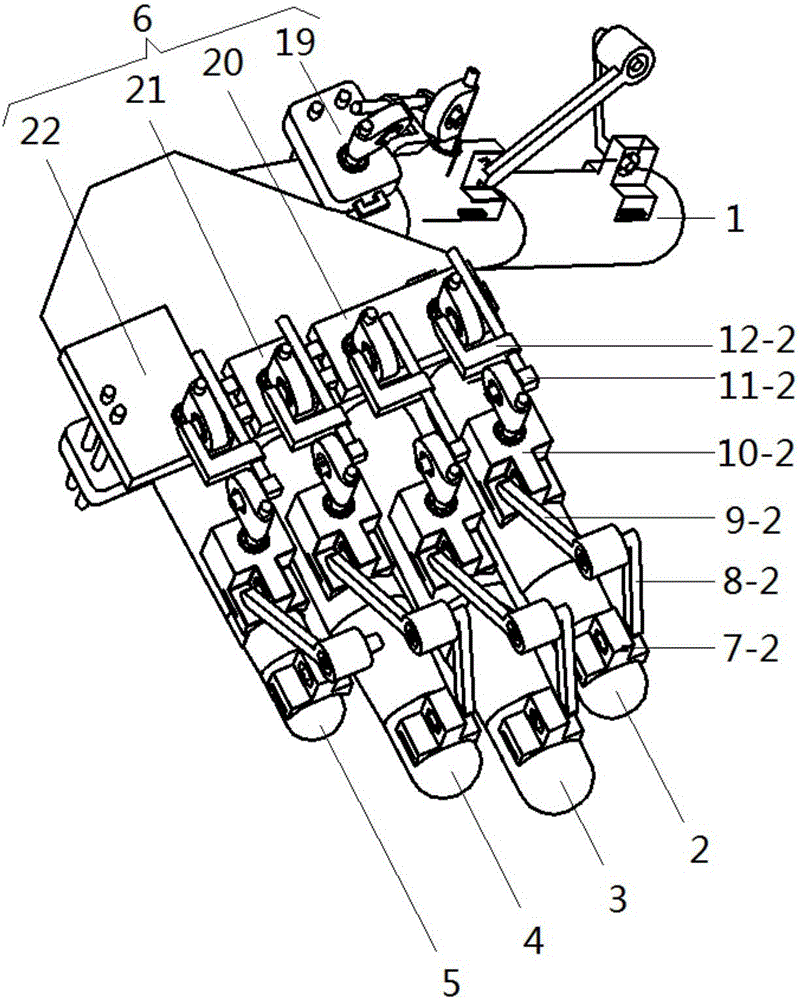
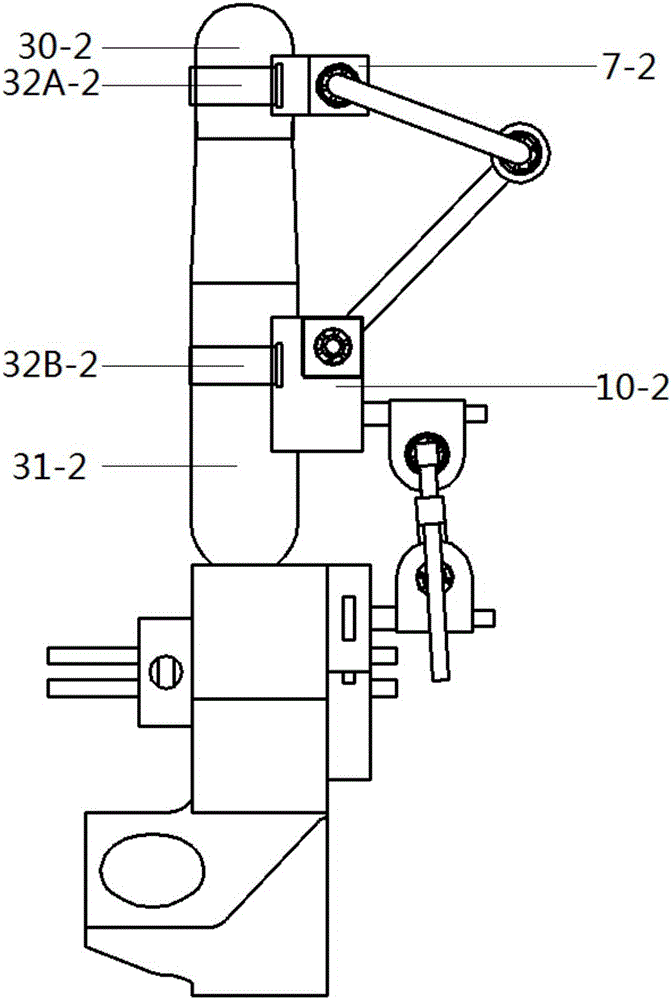
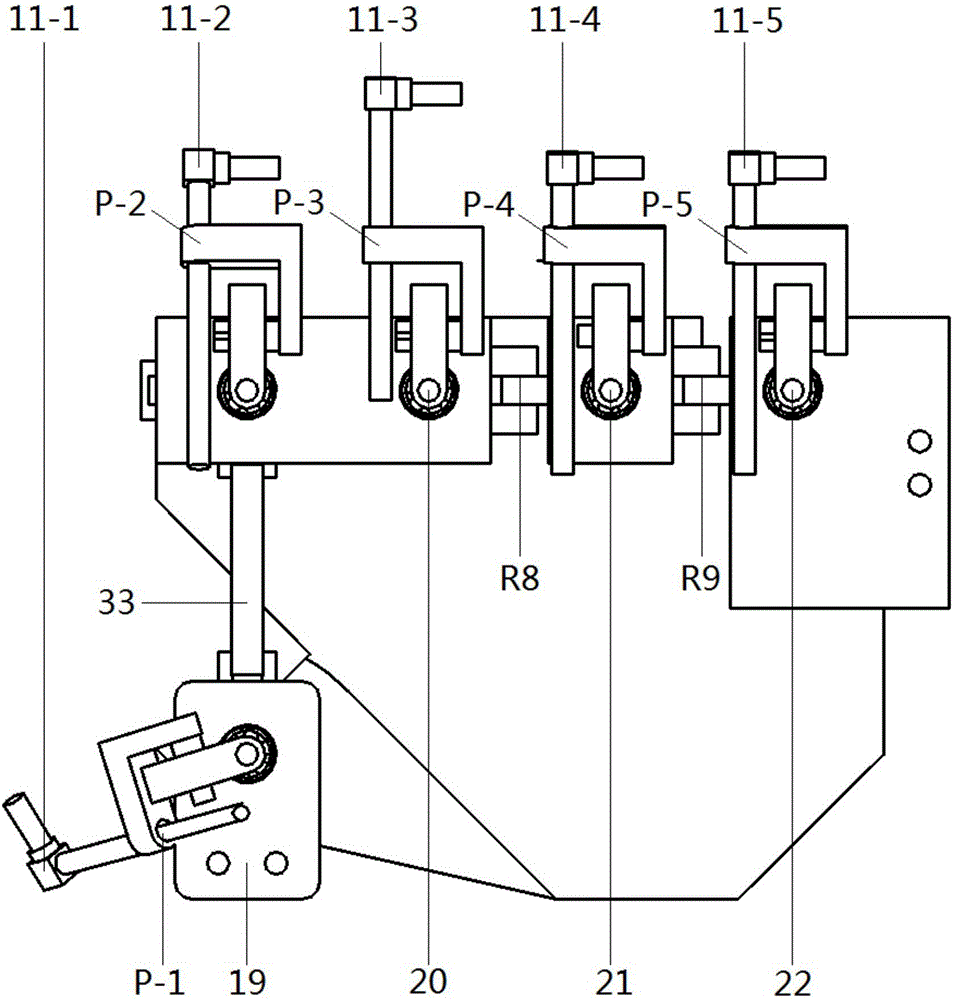
[0027] Such as Figure 1-Figure 9 As shown, a wearable hand exoskeleton device includes a thumb mechanism (1), an index finger mechanism (2), a middle finger mechanism (3), a ring finger mechanism (4), a little finger mechanism (5) and a fixed base (6 ): the mechanism composition of the thumb mechanism (1), index finger mechanism (2), middle finger mechanism (3), ring finger mechanism (4) and little finger mechanism (5) is the same, taking the index finger mechanism (2) as an example, including the index finger mechanism End finger sleeve (7-2), index finger first connecting rod (8-2), index finger rolling bearing two (13B-2), index finger bearing ring two (15B-2), index finger second connecting rod (9-2) , Index finger near-end finger sleeve (10-2) and index finger slide bar (11-2): The index finger first connecting rod (8-2) passes through the index finger rolling bearing two (13B-2), the index finger bearing retaining ring two (15B -2) Connect with the second connecting ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More