

Robot navigation method oriented to virtual images
A virtual image and navigation method technology, applied in the field of navigation, can solve problems such as limiting the range of robot navigation, and achieve the effects of small storage data, low memory consumption, and fast calculation speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
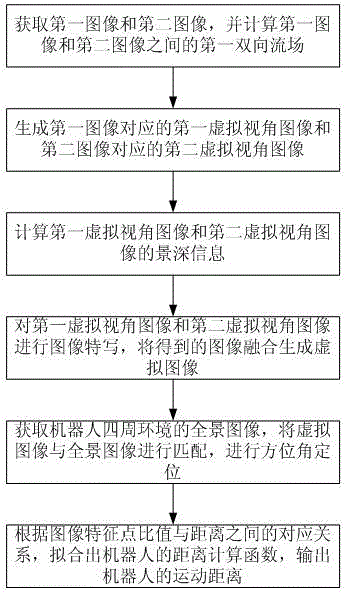
[0021] Such as figure 1 As shown, the virtual image-oriented robot navigation method includes:
[0022] Step 1. Acquire a first image and a second image, and calculate a first bidirectional flow field between the first image and the second image.
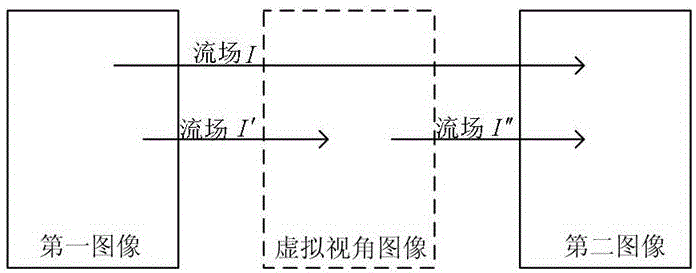
[0023] Step 2: Using the first bidirectional flow field to generate a first virtual perspective image corresponding to the first image and a second virtual perspective image corresponding to the second image.
[0024] Such as figure 2 As shown in , there is also a flow field correspondence between the virtual perspective image and the first image and the second image. Set the image represented by the virtual viewing angle to appear as figure 2 As shown, it can be considered that there is a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More