

Force/position controllable flexible driver
A flexible driver and controllable technology, applied in the field of robotics, can solve the problems of the inability to guarantee the output force of the driver, and it is difficult to meet the requirements, and achieve the effect of alleviating the internal force and protecting the system itself.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
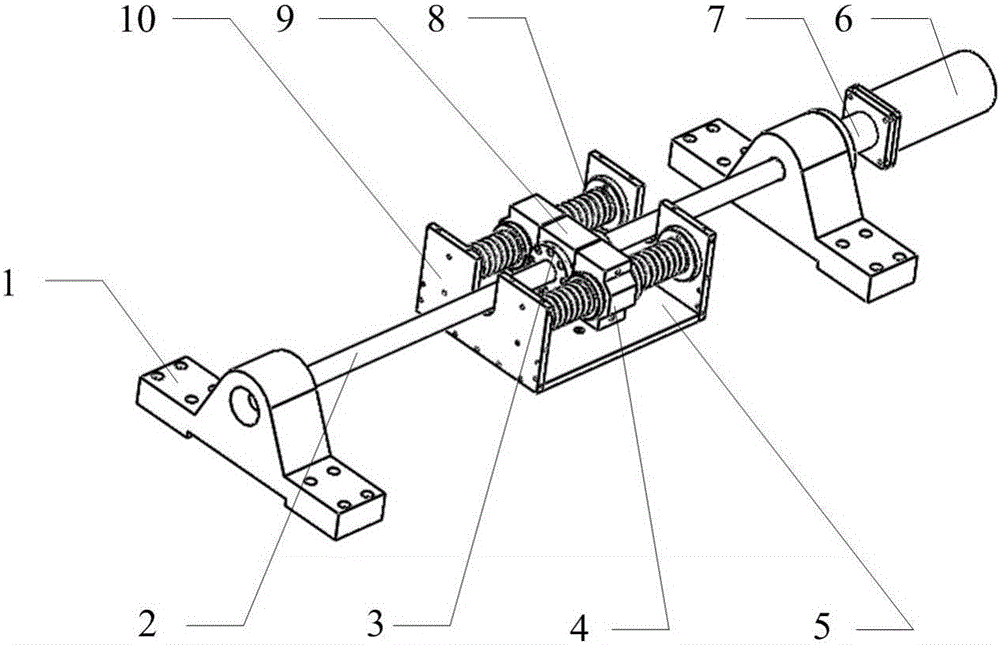
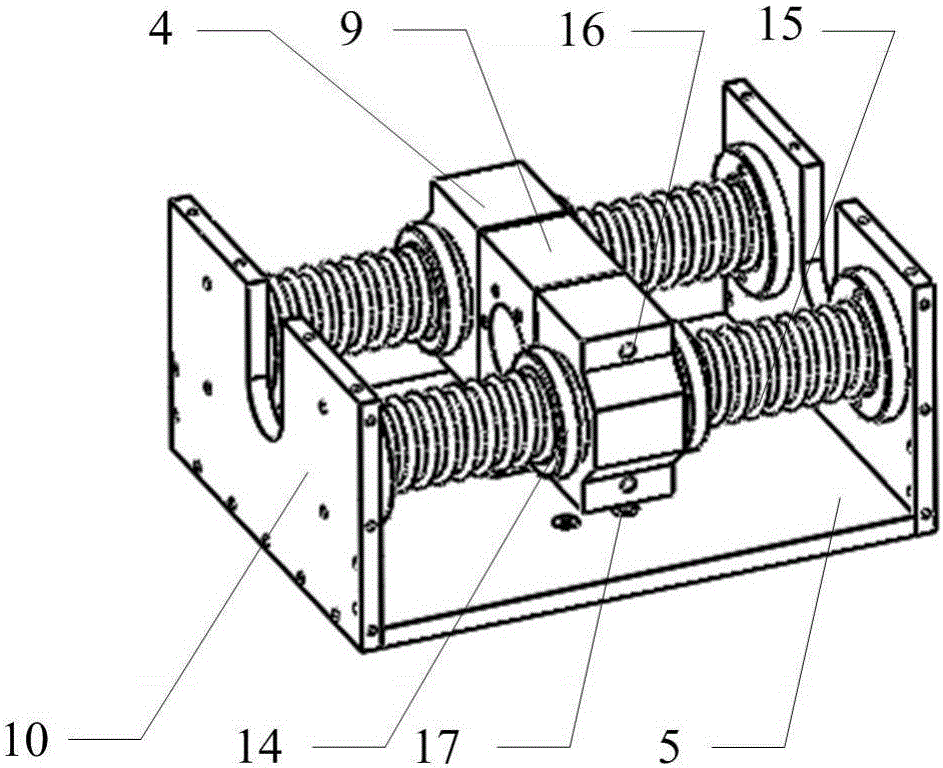
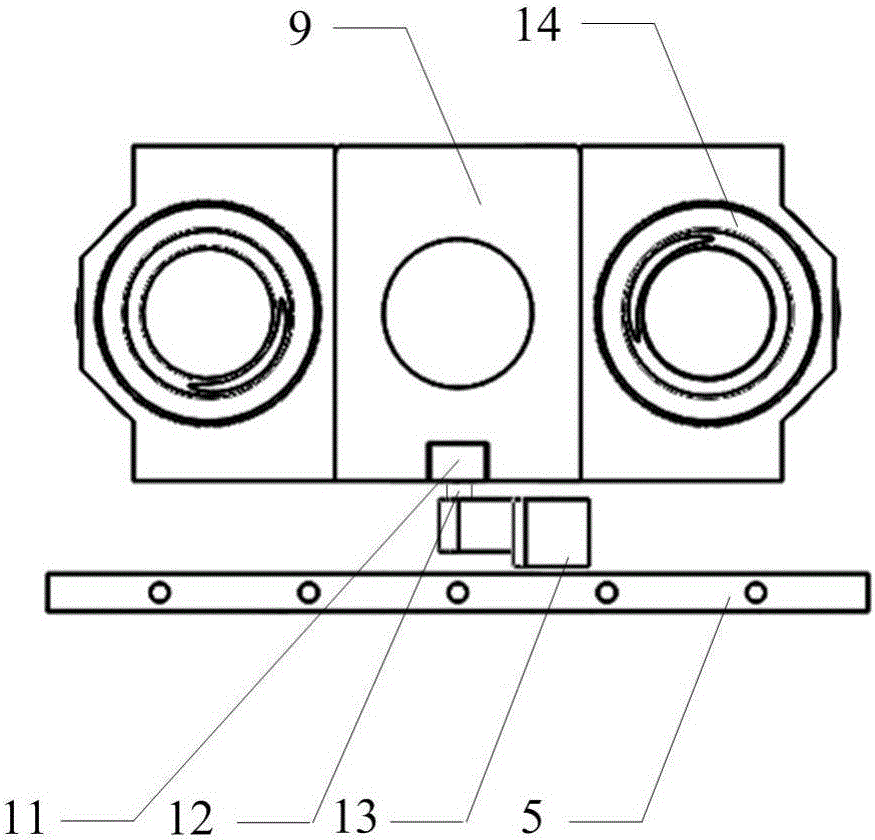
[0020] exist figure 1 , figure 2 , image 3 and Figure 4 In the schematic diagram of the present invention shown, the driving device includes a bracket, a lead screw, a servo motor, a shaft coupling, a nut connector, a long bolt A, a sliding bearing, and an optical shaft. Two identical brackets 1 are respectively provided with through holes, and the two ends of the screw 2 pass through the through holes of the two brackets respectively, and one end of the screw extends to the outside of the brackets, and is connected with the output shaft of the servo motor 6 through the coupling. Shaft 7 is connected. Insert the nut connector 9 on the lead screw, one side of the nut connector is provided with a nut 3, the nut is threadedly connected with the lead screw, and the two ends of the nut connector are respectively connected with a sliding bearing 4 through a long bolt A16. An optical shaft 15 is respectively plugged into each sliding bearing, and both ends of the optical shaft...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More