

Pole-climbing robot
A technology of robots and climbing poles, applied in the field of robots, can solve the problem of high equipment cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described below in conjunction with the accompanying drawings.
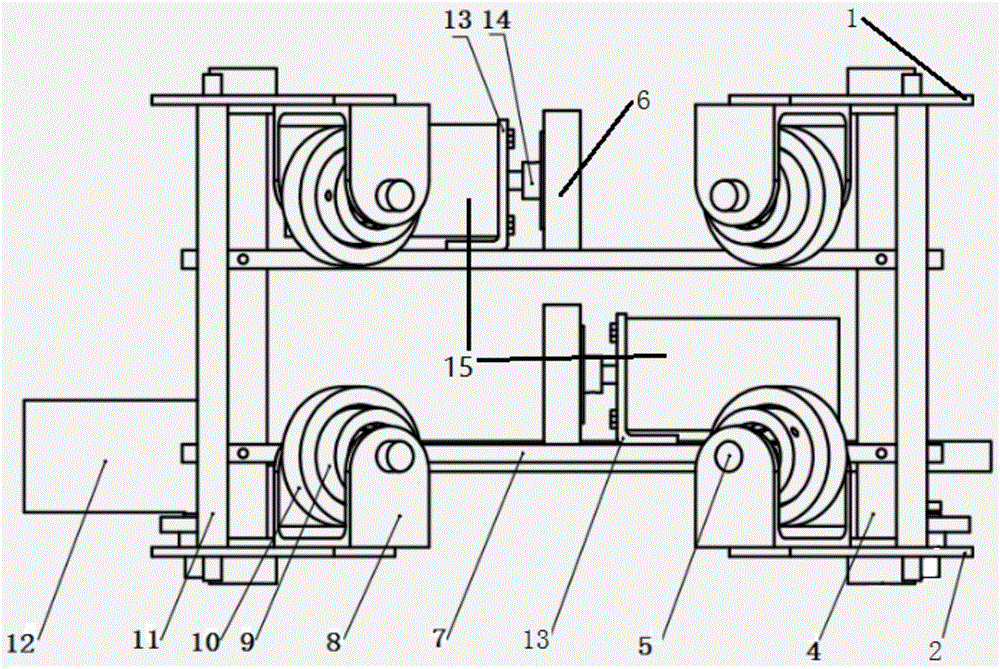
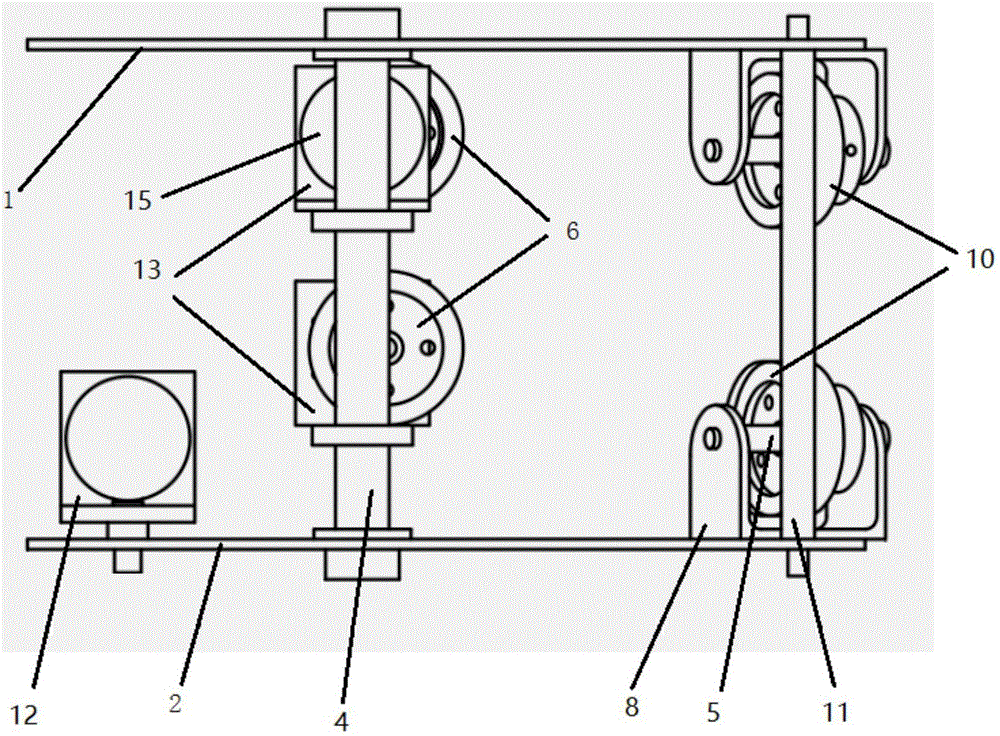
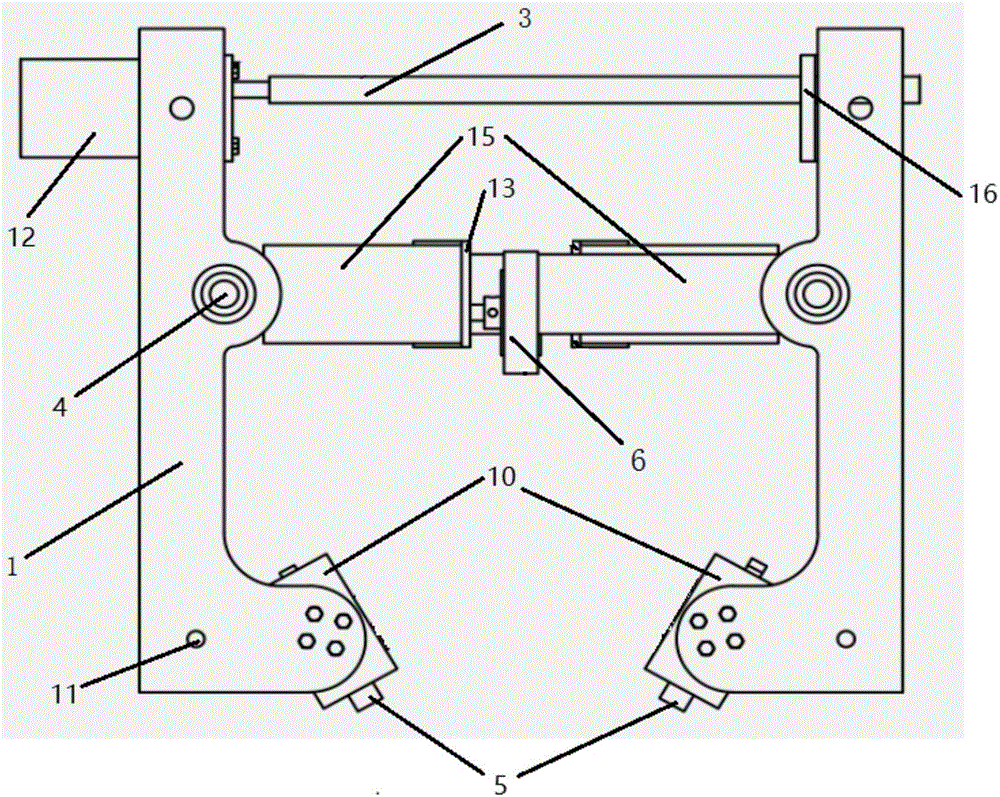
[0018] Such as Figure 1 to Figure 3 Shown is a structural diagram of an embodiment of the present invention, including: left and right clamping units, a ball screw 3, a stepping motor 12, two driving wheels 6 and four driven wheels 10;
[0019] Both the left and right clamping units include upper and lower fixing plates 1 and 2 arranged in parallel, and a main supporting shaft 4 and an auxiliary supporting shaft 11 are arranged between the upper and lower fixing plates 1 and 2; the two ends of the main supporting shaft 4 are connected to the upper 1. The middle and rear ends of the lower fixed plates 1 and 2 are connected, and respectively form a rotating pair structure with the upper and lower fixed plates 1 and 2; the two ends of the auxiliary support shaft 11 are respectively fixedly connected with the front ends of the upper and lower fixed plates 1 and 2; The ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More