

Processing method of multi-mode input data for intelligent robot and robot operation system
An intelligent robot and data input technology, applied in the field of intelligent robots, can solve the problems of long time, low hit rate, and limited multi-modal input data processing speed of intelligent robots, so as to avoid the effect of missing execution.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The implementation of the present invention will be described in detail below with reference to the accompanying drawings and embodiments, so as to fully understand how the present invention applies technical means to solve technical problems and achieve corresponding technical effects and implement them accordingly. The embodiments of the application and the features in the embodiments can be combined with each other under the premise of no conflict, and the technical solutions formed are all within the protection scope of the present invention.
[0025] In addition, the steps shown in the flowchart of the drawings may be executed in a computer system such as a set of computer-executable instructions. Also, although a logical sequence is shown in the flowchart, in some cases, the steps shown or described may be performed in a different order than here.
[0026] (Example)
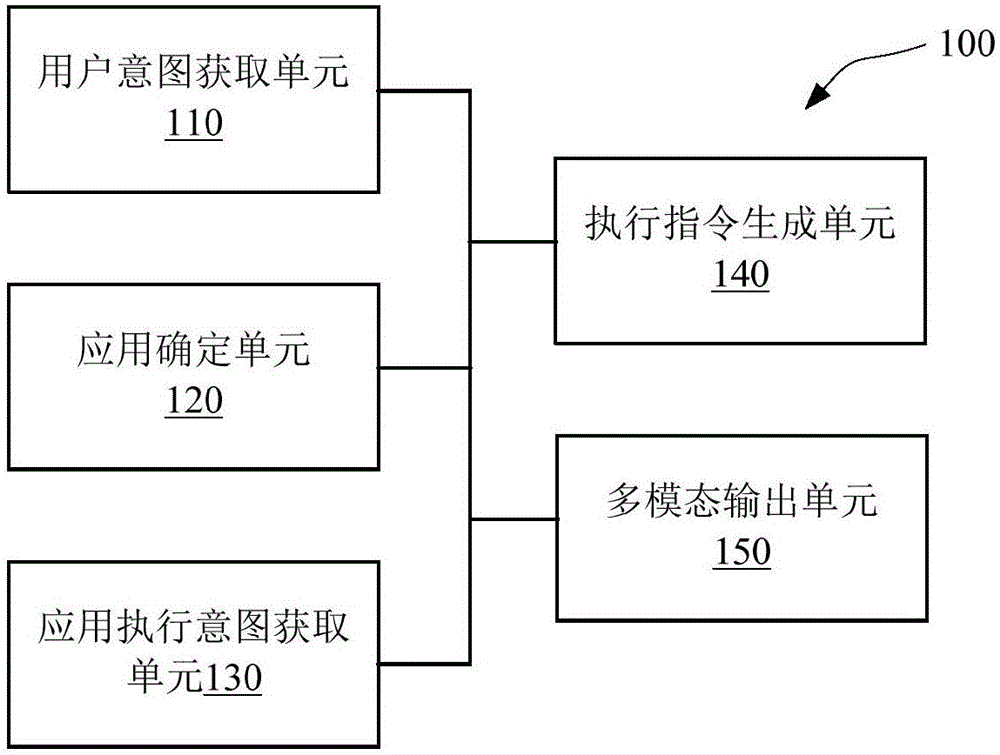
[0027] figure 1 It is a structural block diagram of a robot operating system 100 for processing multi-m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More