Novel automatic kitchen waste collecting and transporting system
A new type of technology for food waste, which is applied in the field of new automatic collection and transportation system of food waste, can solve the problems of imperfect system, small net weight value, incomplete balance of rear wheels of heavy vehicles, etc., and achieve the goal of avoiding cheating in weighing Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
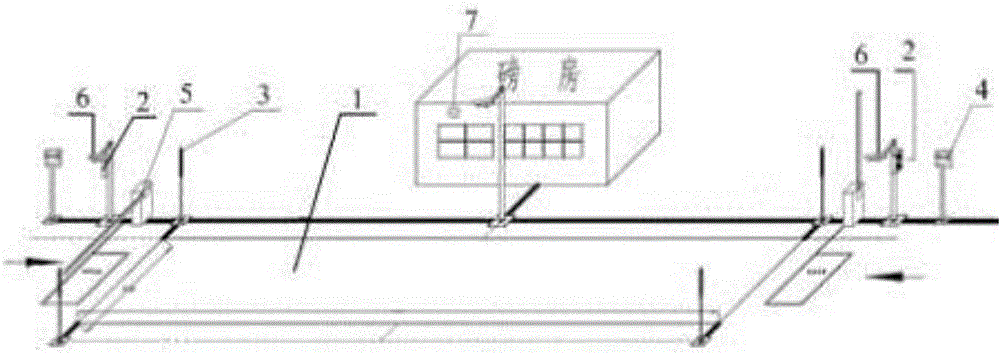
[0019] A new type of automatic food waste collection and transportation system includes a control management system, a vehicle-mounted terminal system, and an unattended weighing system. The kitchen waste transport vehicle collects kitchen waste, and the on-board terminal system reads the electronic identity of the trash can, and transmits the identity information to the control management system through GPS. The control management system counts the collected identity information and calculates the garbage cans collected The number of barrels; the kitchen waste transport vehicle weighs through the unattended weighing system, and the unattended weighing system transmits the weighing information to the control management system through the transmission network; the unattended weighing system includes computer control modules, Truck scale, smart card identification module, barrier gate, video monitoring module, infrared monitoring module and voice command module, the smart card id...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



