

Binocular stereo vision positioning device and positioning method for spraying robot
A binocular stereo vision and spraying robot technology, which is applied in the field of robots, can solve the problems of spraying failure, robot spraying accuracy drop, and high positioning accuracy of the vehicle body mobile frame, so as to achieve the effect of visual positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings and examples, and the contents of the examples are not intended to limit the protection scope of the present invention.
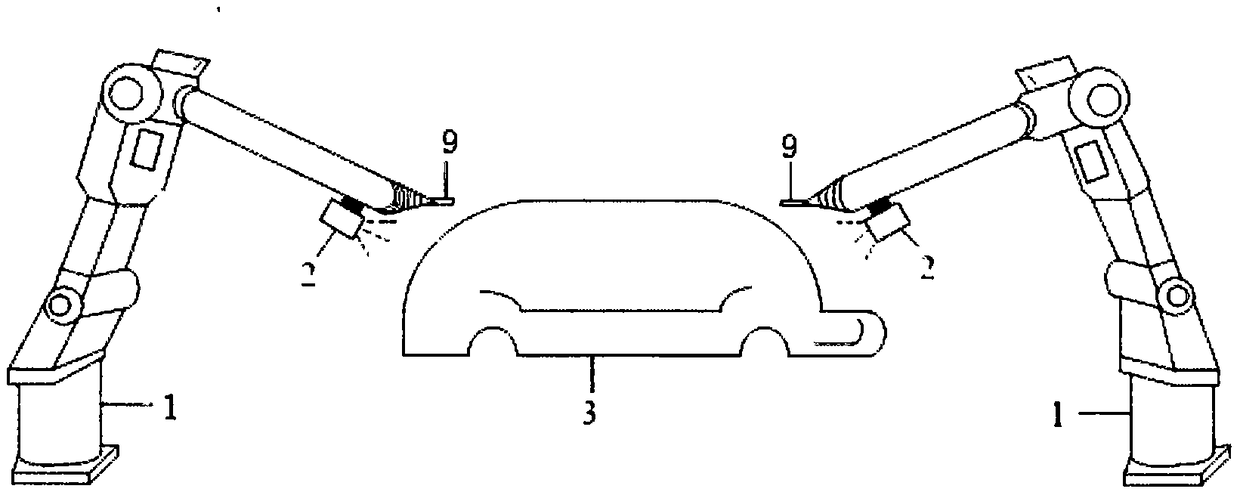
[0028] figure 1 A schematic diagram of the principle structure of the binocular stereo vision positioning device of the spraying robot of the present invention is shown. like figure 1 As shown, the binocular stereo vision positioning device of the painting robot of the present invention includes two sets of binocular stereo vision systems 2 respectively installed at the ends of the two painting robots 1 . The two painting robots 1 are respectively located on the left and right sides of the vehicle body 3 in the painting system. Moreover, the binocular stereo vision system 2 is located about 100mm above the spray gun 9 of the painting robot 1, and the change of the position of the vehicle body 3 is detected by two sets of binocular stereo vision syste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More