A Control Method of Robot's Output Action and the Robot
An output control and robot technology, applied in the field of robotics, can solve problems such as accidental injury to users, improve user experience and ensure application security.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The implementation of the present invention will be described in detail below in conjunction with the accompanying drawings and examples, so that implementers of the present invention can fully understand how the present invention uses technical means to solve technical problems, and achieve the realization process of technical effects and according to the above-mentioned realization process The present invention is implemented concretely. It should be noted that, as long as there is no conflict, each embodiment and each feature in each embodiment of the present invention can be combined with each other, and the formed technical solutions are all within the protection scope of the present invention.
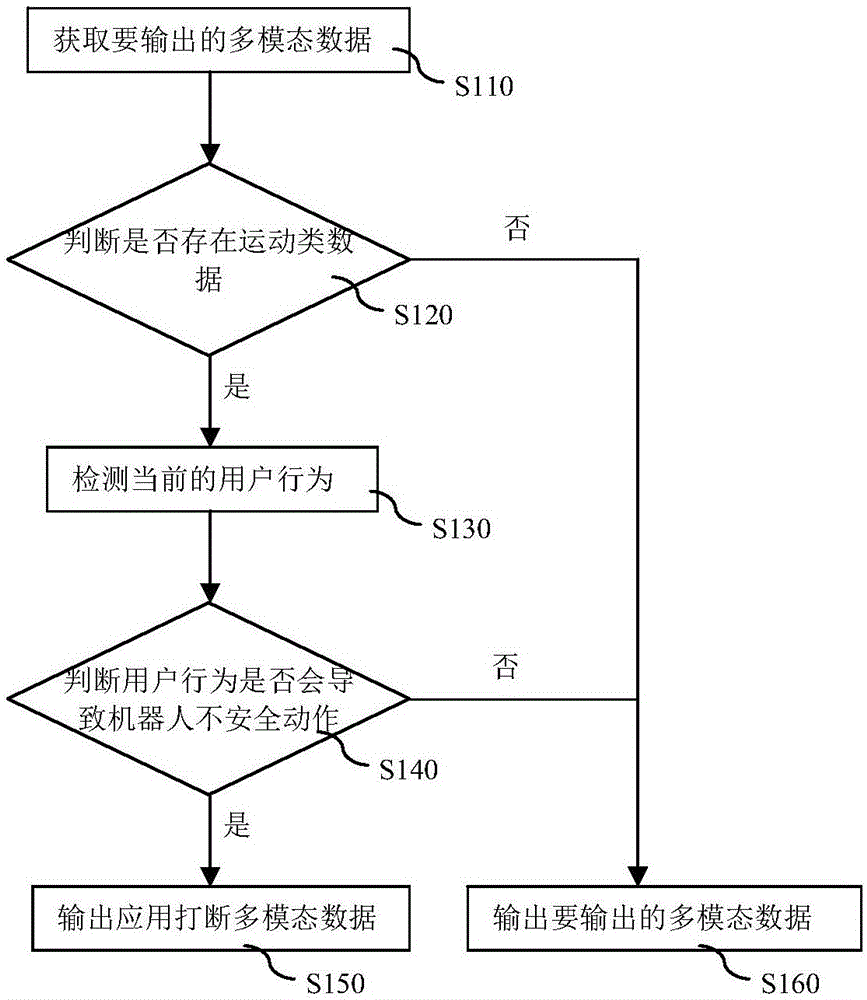
[0045] At present, most intelligent robots have the function of action output. During the human-computer interaction process between the intelligent robot and the user, the robot will make corresponding action responses based on the user's interactive input. Since human-co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More