

Nine-degree-of-freedom binocular bionic eyes
A technology of bionic eyes and degrees of freedom, applied in the field of intelligent bionic robots, can solve the problems of inability to achieve anisotropic motion, no mechanical structure and transmission method, and no neck.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
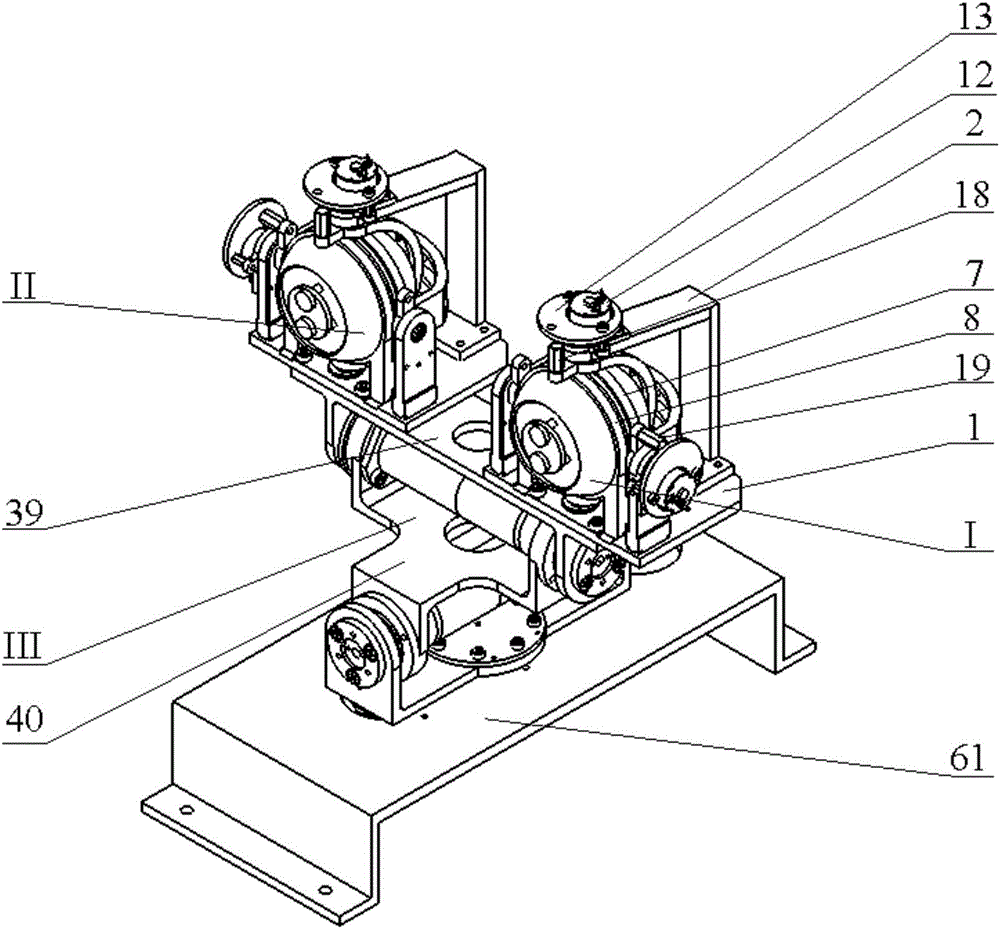
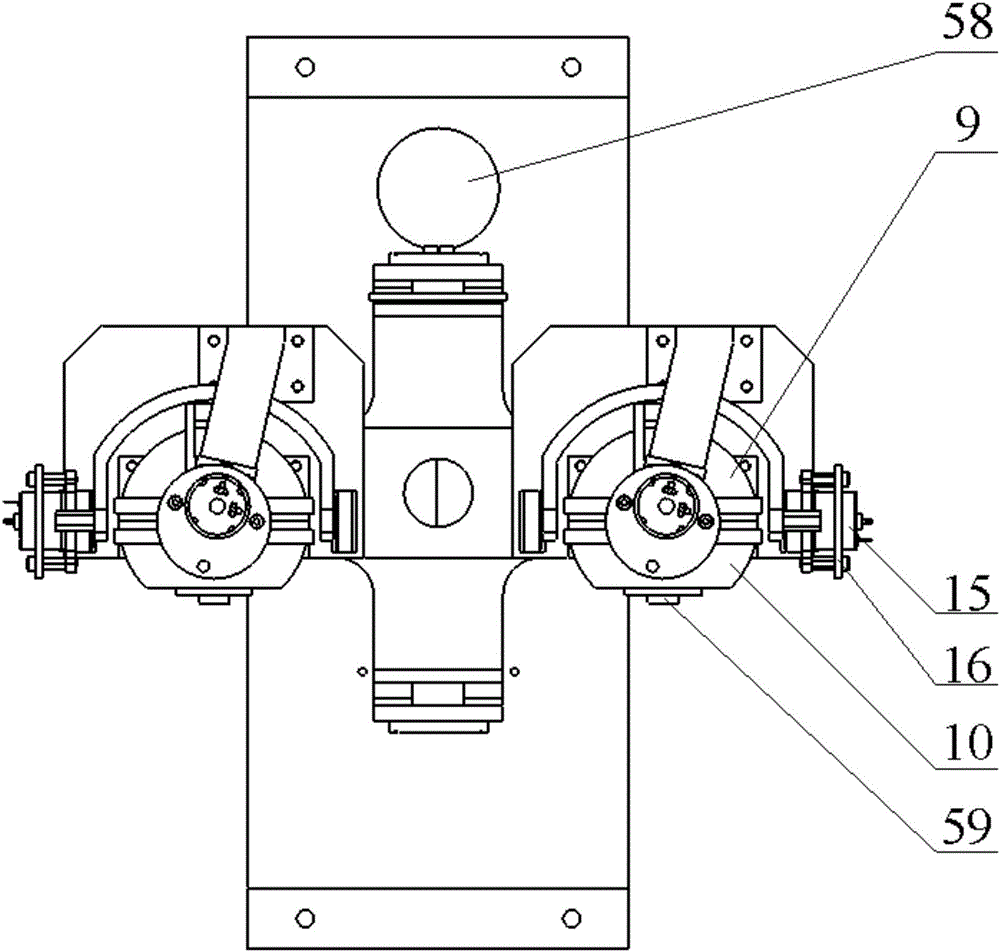
[0016] Referring to the accompanying drawings, a nine-degree-of-freedom binocular bionic eye includes: a binocular bionic eye composed of a left eyeball mechanism I and a right eyeball mechanism II, and a neck mechanism III;
[0017] The left eyeball mechanism 1 has three degrees of freedom, and it comprises: be installed in the eyeball and can self-rotate camera 59, be used to control the first motor 12 of eyeball left and right motion and be used to control the second motor 15 of eyeball up and down motion; Eyeball mechanism 1 is installed on the support 39;
[0018] The right eyeball mechanism II has the same composition as the left eyeball mechanism I, and is installed on the support 39 in a mirror-symmetrical manner;
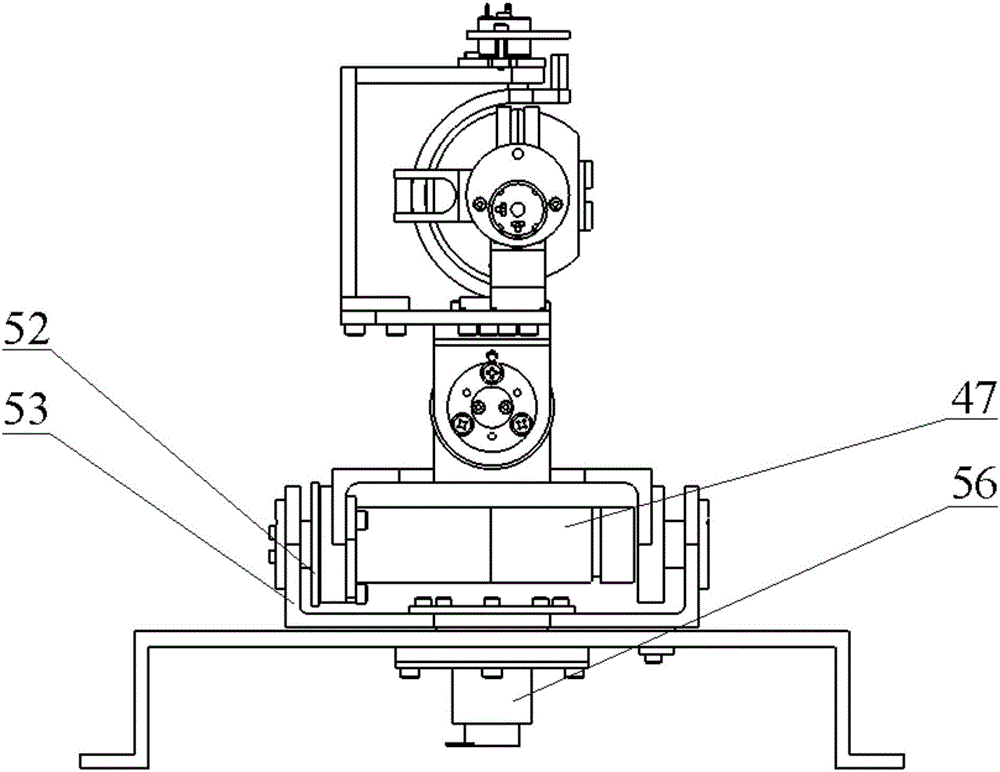
[0019] The neck mechanism III has three degrees of freedom, and it includes: the first neck motor 41, the second neck motor 47 and the third neck motor 56 whose output shafts are perpendicular to each other; the third neck motor 56 is vertically arranged ,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More