

End effector, industrial robot, and method for operating same
一种工业用机器人、末端执行器的技术,应用在机械手、制造工具、夹头等方向,能够解决机器人制造成本增加、空间增大等问题,达到抑制制造成本增加、扩大范围的效果
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Hereinafter, the end effector 4 of the industrial robot 1 according to an embodiment of the present invention will be described with reference to the drawings.
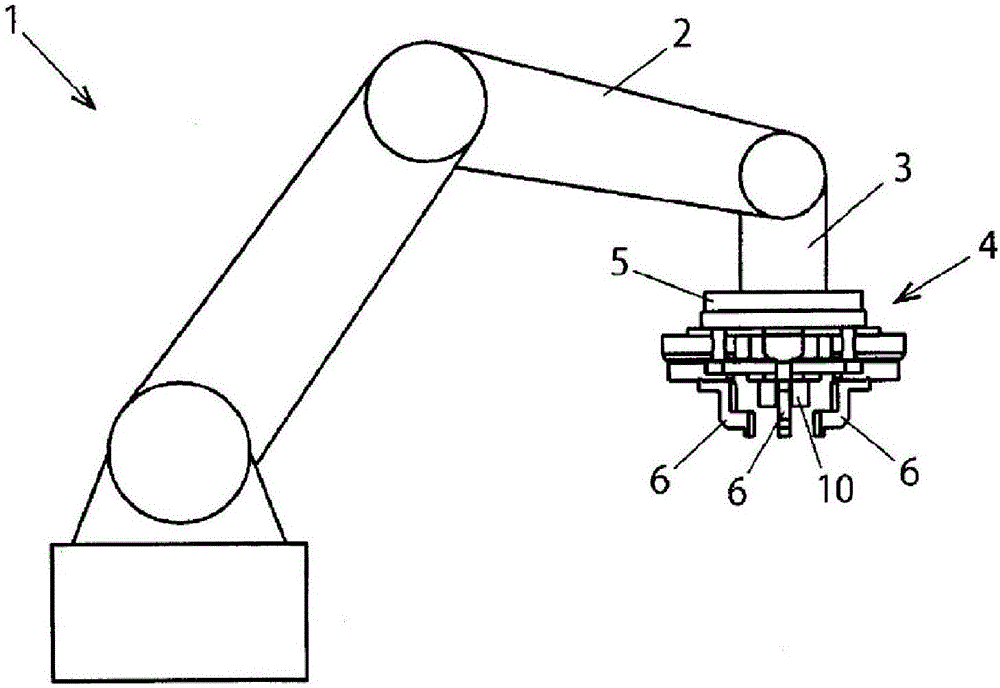
[0032] Such as figure 1 As shown, the industrial robot 1 of the present embodiment includes: an articulated robot arm 2; and an end effector (hand) 4, and a wrist shaft 3 attached to the tip of the robot arm.
[0033] In addition, the type of industrial robot to which the present invention is applied is not particularly limited, and can be applied to various industrial robots such as a vertical articulated robot or a horizontal articulated robot.
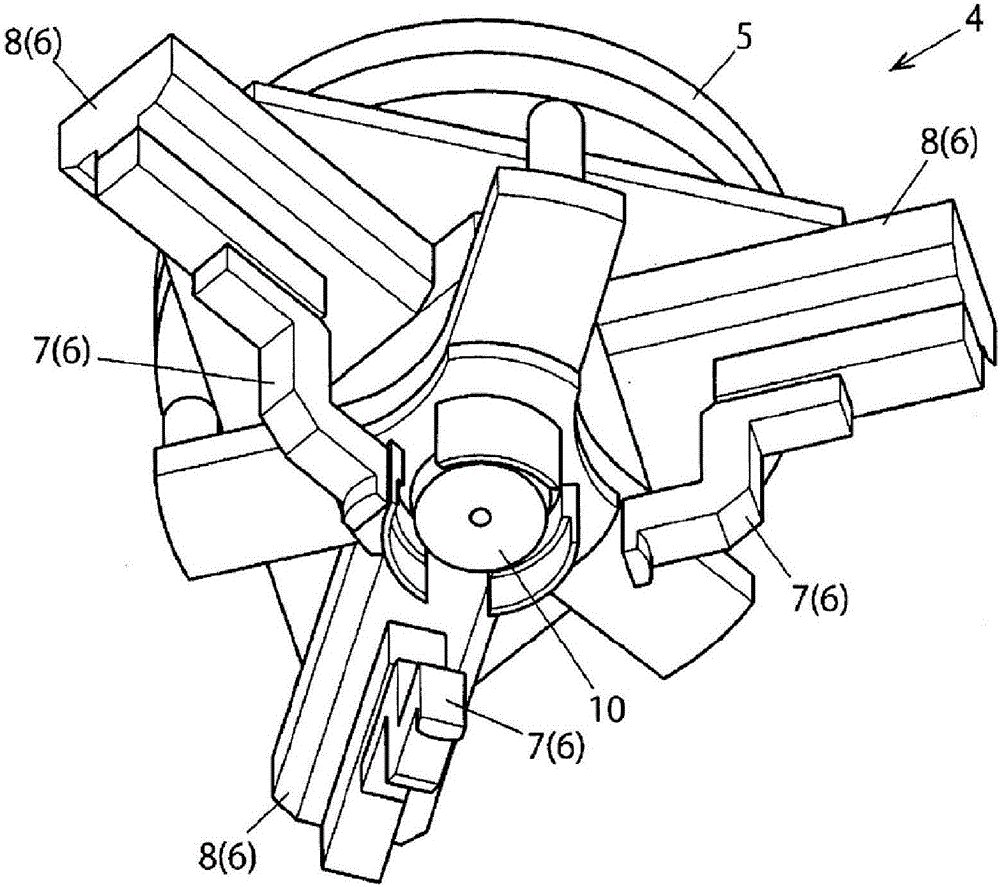
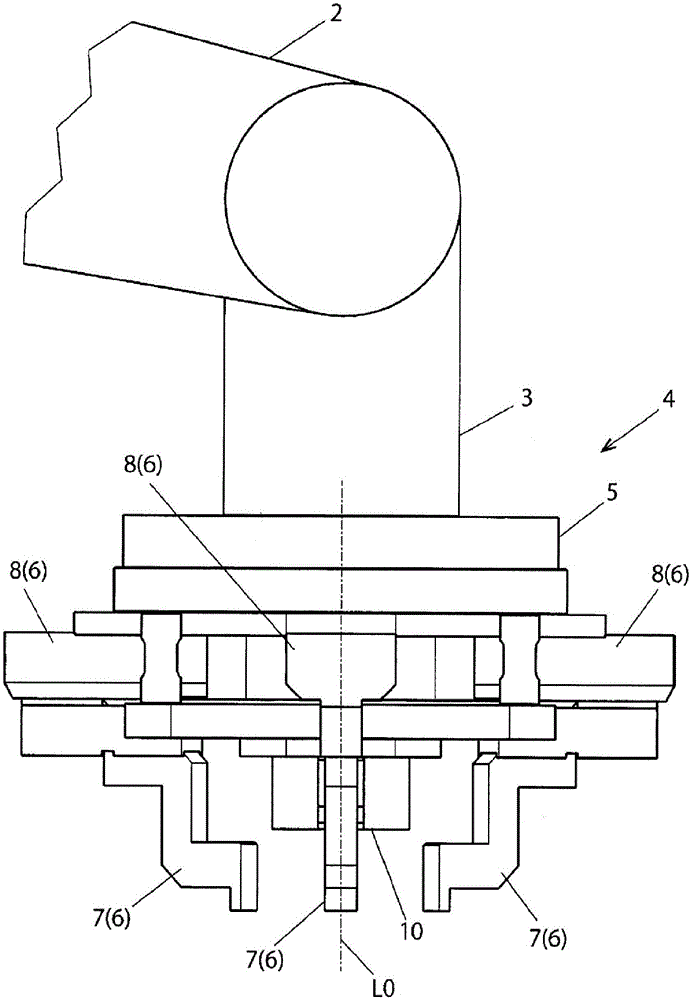
[0034] Such as Figure 2 to Figure 4 As shown, the end effector 4 in this embodiment is provided with an end effector base 5 connected to the robot arm 2 ( figure 1 ). The end effector base 5 is provided with a first object holding mechanism 6 for holding a first type of processing object.
[0035] The first object holding mechanism 6 has a plurality of first grasping membe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More