

Leaf-spring-based robot flexile joint with continuously-adjustable rigidity
A technology of flexible joints and spring sheets, which is applied in the field of robot bionic joints, can solve the problems of high manufacturing and installation precision, large vibration and noise, and reduced versatility, and achieve continuous adjustment of stiffness, slow down external impact forces, and improve safety. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present application will be further described in detail below in conjunction with the drawings and specific embodiments.
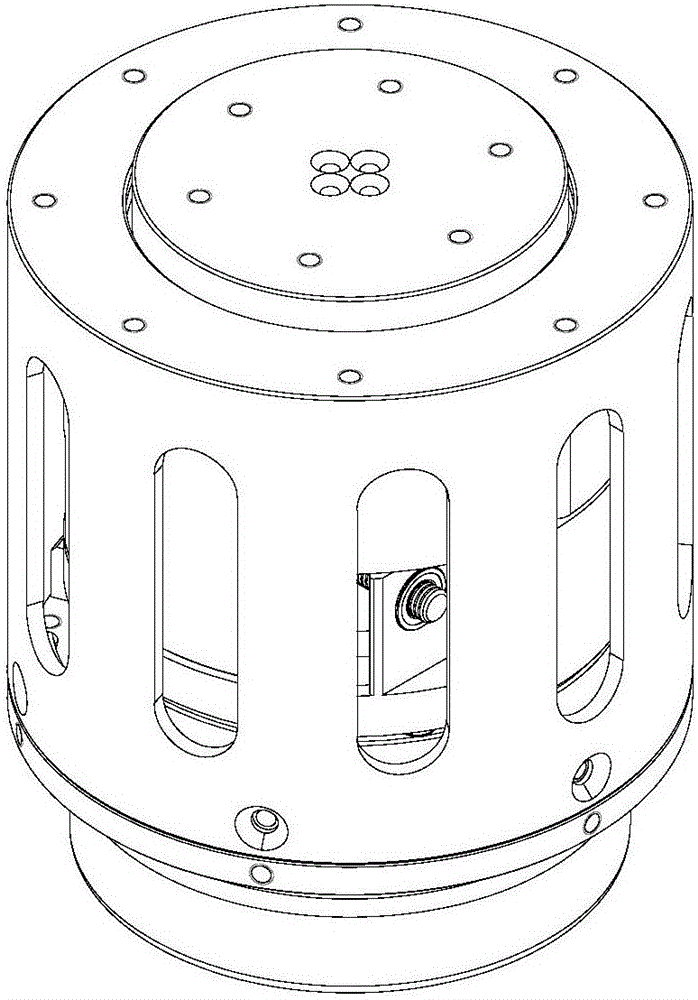
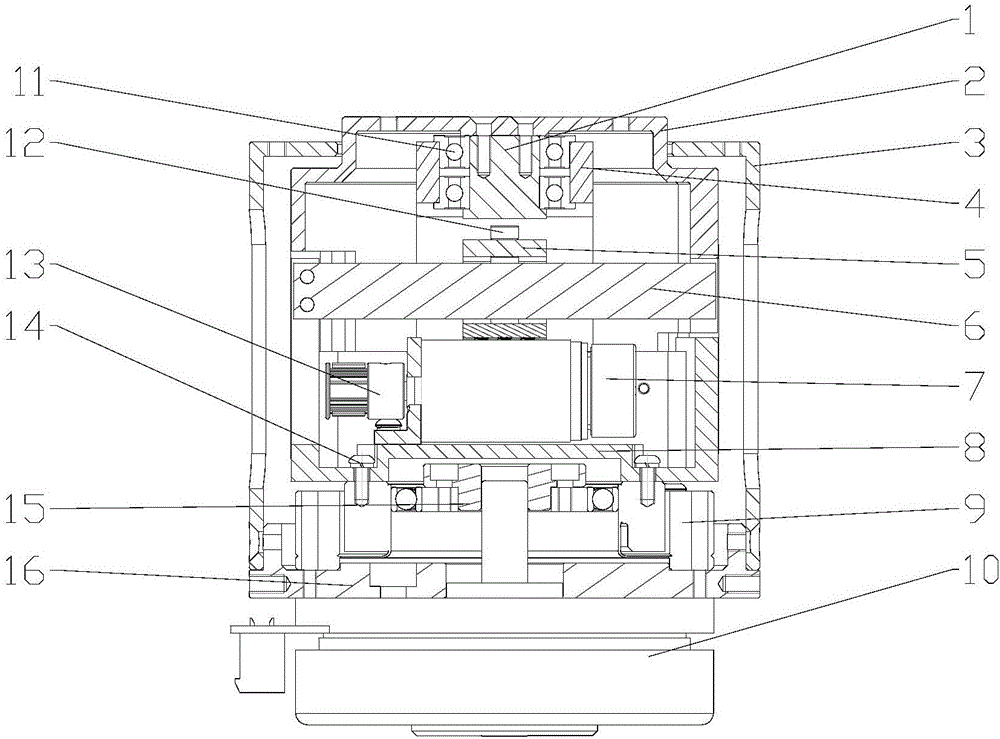
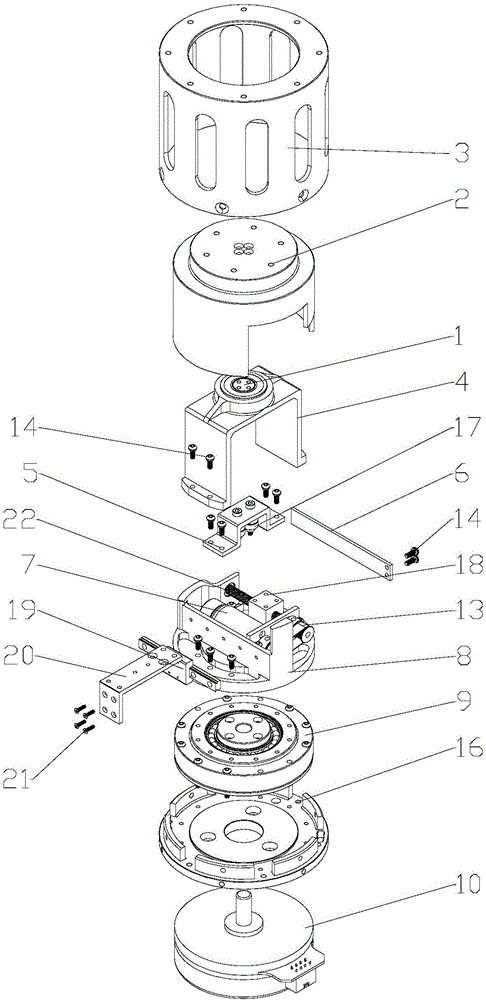
[0021] Such as figure 1 with 2 As shown, a robot flexible joint with continuously adjustable stiffness based on a spring sheet includes a driving end, a stiffness adjustment mechanism, a spring sheet 6 , an output flange 2 , an output shaft 1 and a joint housing 3 .
[0022] Described driving end comprises drive motor 10, speed reducer holder 16, harmonic speed reducer 9, and the shell of described harmonic speed reducer 9 is fixed on the speed reducer holder 16 by screw, and the output shaft of described drive motor 10 It is drivingly connected to the input end of the harmonic reducer 9, and the output end of the harmonic reducer 9 is connected to the stiffness adjustment mechanism...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More