

Moving-base-object relative attitude measuring method based on dual-IMU-and-visual fusion and system
A technology of relative attitude and measurement method, which is applied to measurement devices, navigation through velocity/acceleration measurement, mapping and navigation, etc. It can solve the problems that fusion results are difficult to meet measurement requirements and truncation errors, and achieve easy installation and movement. The effect of truncation error and simple overall structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described below through specific embodiments and drawings. The embodiments of the present invention are to better enable those skilled in the art to better understand the present invention, and do not limit the present invention in any way.
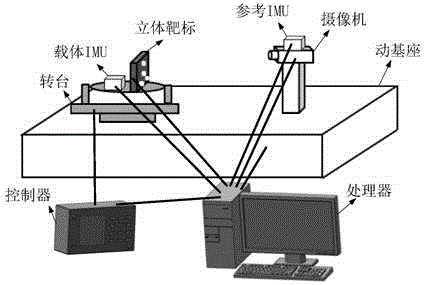
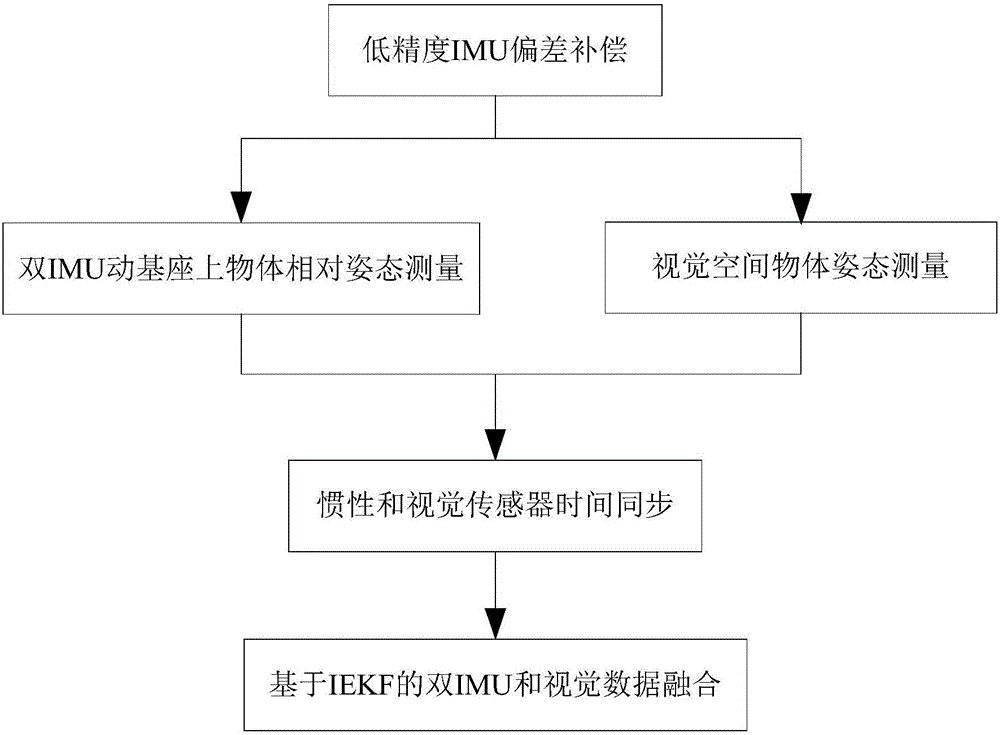
[0047] Such as figure 1 As shown, the method for measuring the relative posture of an object on a moving base based on dual IMU and vision fusion of the present invention includes the following steps:
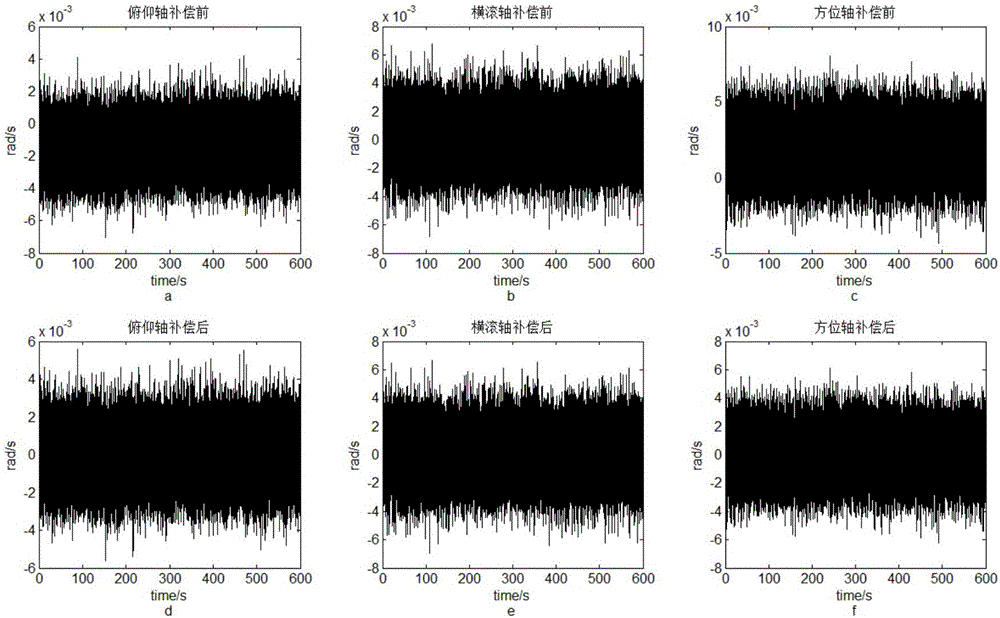
[0048] Step 1: Low precision IMU deviation compensation
[0049] The measurement output of the gyroscope in the inertial sensor has zero deviation, dynamic drift, etc. The zero deviation is calibrated in the initial calibration stage and the calibration coefficient is given. In the measurement process, the calibrated zero deviation coefficient is used to compensate the zero deviation in the original measured output value of the gyroscope; the drift error of the gyroscope is compensated by feedback cor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More