

Method and device for identifying motor moment of inertia and motor control device
A technology of moment of inertia and identification method, which is applied in the fields of identification of moment of inertia of motors and devices and motor control devices, can solve problems such as complex process, large amount of calculation, and failure of identification, and achieve the effect of simple method, small amount of calculation, and easy realization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0055] For PMSM, when using i d = 0 control strategy, its output torque T e with its torque current i q Satisfy the following relationship:
[0056] T e = K t i q (4)
[0057] Among them, K t is the torque coefficient of the motor, i q is the q-axis component of the stator current of the motor.
[0058] Substituting formula (4) into formula (2), after sorting, we get:
[0059]
[0060] For the dynamic system shown in formula (5), the real-time observation There are many methods, such as using Extended State Observer (ESO) (refer to "Active Disturbance Rejection Control Technology - Control Technology for Estimating and Compensating Uncertainty Factors", Han Jingqing, 2013, National Defense Industry Press), equivalent input disturbance observation (Rui-Juan Liu et al., Active Disturbance RejectionControl Based on an Improved Equivalent-Input-Disturbance Approach, IEEE / AMSETran.On Mechatronics, P1410~1413, Vol.18, No.4, August 2013) and unknown input observer ( G...
Embodiment 2
[0085] This embodiment is similar to Embodiment 1, and only the differences will be described below.
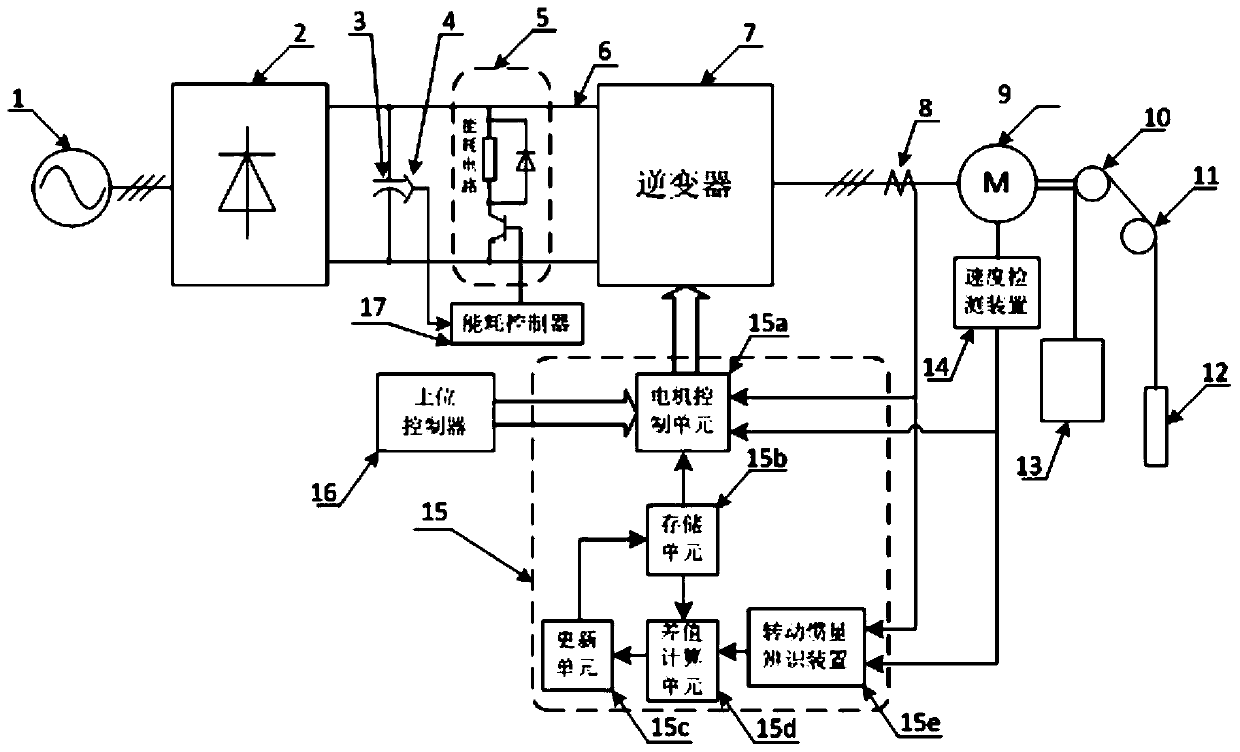
[0086] Compared with Embodiment 1, the motor moment of inertia identification device 15e of this embodiment omits the acceleration calculator for calculating the angular acceleration of the motor.
[0087] Carry out bilateral integration on formula (12) and formula (13) respectively to get:
[0088]
[0089]
[0090] Considering that the moment of inertia of the elevator drive motor is approximately a constant value, there are:
[0091]
[0092]
[0093] In the formula, J is the moment of inertia of the motor speed control system, K t is the torque coefficient of the motor, is the torque current command value of the motor, i q is the q-axis current obtained after the motor stator current detected by the current detection device 8 undergoes appropriate coordinate transformation, is the disturbance torque observation result output by the disturbance torque obs...
Embodiment 3
[0096] This embodiment is similar to Embodiment 1, and only the differences will be described below.
[0097] Compared with Embodiment 1, the motor moment of inertia identification device 15e of this embodiment omits the acceleration calculator for calculating the angular acceleration of the motor.
[0098] When elevator drive motor 9 was in motor zero speed or when running at a constant speed, Formula (12) and formula (13) then become:
[0099]
[0100]
[0101] When the moment of inertia recognizer is in the zero-speed or uniform-speed motion state of the elevator, according to the disturbance torque observation result and the torque current value i output by the disturbance torque observer q Calculate the moment of inertia of the motor according to formula (18), or according to the disturbance torque observation result and torque current command value output by the disturbance torque observer Calculate the moment of inertia of the motor according to formula (19). ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More