

Motor torque coefficient identification method and device, motor control device and judging device
A technology of motor torque and torque coefficient, applied in the field of online identification method and identification device of motor torque coefficient, can solve problems such as acceleration error, interference, error, etc., achieve accurate identification results, accurate observation results, and wide application range Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
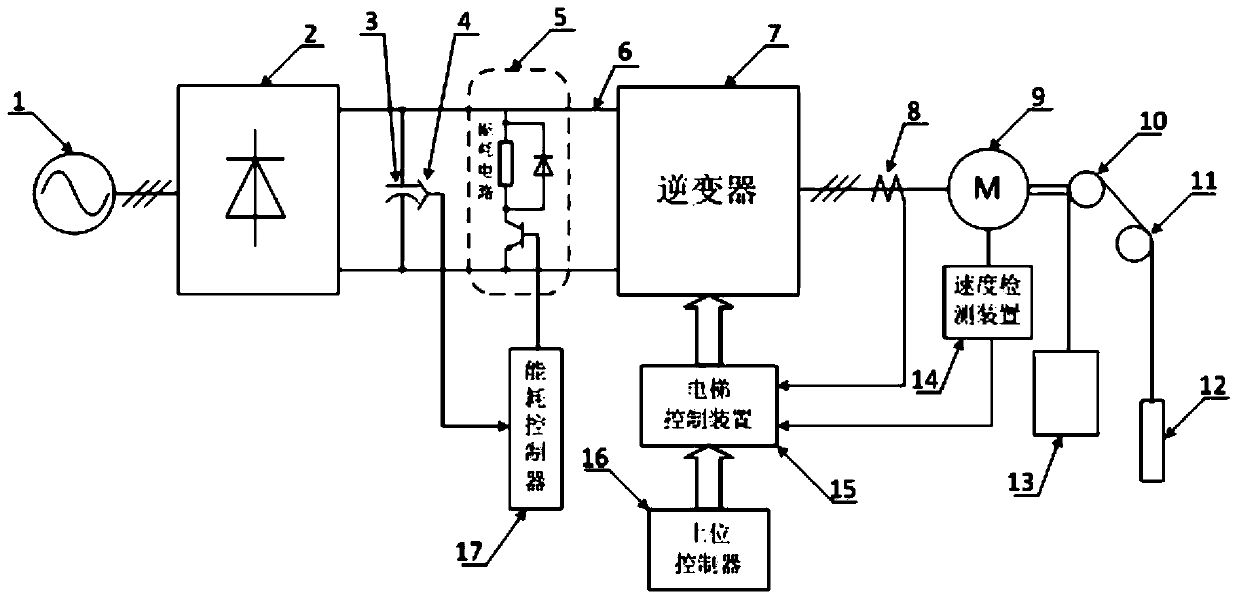
[0082] In order to realize the online identification of the torque coefficient of the elevator drive motor, the motor torque coefficient identification device includes a disturbance torque observer, a torque current calculator and a torque coefficient identifier, wherein:
[0083] The disturbance torque observer is used to observe the disturbance torque in the motor drive system. As mentioned above, the specific form can be extended state observer (ESO), equivalent input disturbance observer, unknown input observer (UIO) or other Observers, filters, etc. that can observe disturbances;
[0084] The torque current calculator is used to calculate the torque current of the motor, and the current information required for calculation can be the detection result of the current detection device 8, or the motor current obtained after the coordinate transformation of the detection result of the current detection device 8, or the The current command value of the current controller output...
Embodiment 2
[0095] Embodiment 2 is similar to Embodiment 1, and only the differences are described.
[0096] Compared with Embodiment 1, the torque coefficient identifier of this embodiment first calculates the actual output torque of the motor according to the disturbance observation result output by the disturbance torque observer, then calculates the torque current of the motor, and then Calculate the integral value of the actual output torque of the motor and the integral value of the torque current in the same period of time, and finally use the integral value of the actual output torque of the motor, the integral value of the torque current and the integral time to calculate the motor speed Moment factor.
[0097] After selecting an integration period, the bilateral integration of formula (14a) is obtained:
[0098]
[0099] Considering that the torque coefficient of the elevator drive motor 9 is approximately a constant value, so there are:
[0100]
[0101] In the formula,...
Embodiment 3
[0111] Embodiment 3 is similar to Embodiment 1, and only the differences are described. Compared with Embodiment 1, the motor torque coefficient identification device of this embodiment also adds an acceleration calculator.
[0112] The acceleration calculator is used to calculate the acceleration of the elevator drive motor 9, and the required speed information can be the detection result of the speed detection device 14, or the speed instruction from the host controller 16.
[0113] Different from the torque coefficient identifier in Embodiment 1, the torque coefficient identifier of this embodiment is based on the disturbance torque observation result output by the disturbance torque observer, the acceleration of the motor output by the acceleration calculator information and the torque current output by the torque current calculator or its instruction value to calculate the torque coefficient of the motor, specifically, firstly, according to the disturbance observation res...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More