

Rotary carrying manipulator
A technology of manipulators and rotary joints, applied in the field of robots, can solve the problems of low efficiency of handling manipulators, achieve the effects of saving handling time, improving automation level, and improving production efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further elaborated below in conjunction with illustrations and specific embodiments.
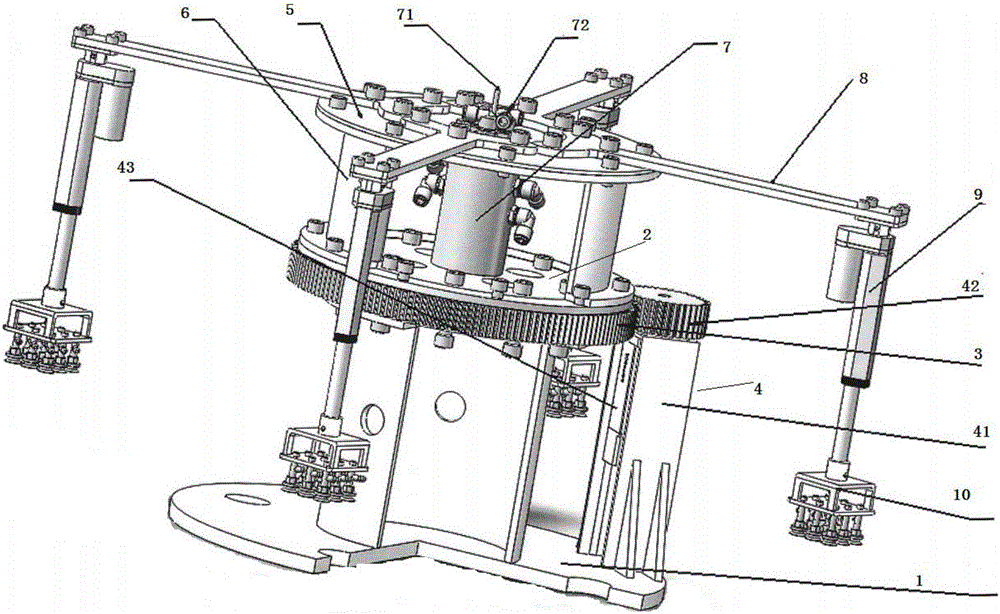
[0026] Such as figure 1 As shown, a kind of rotary handling manipulator proposed by the present invention includes
[0027] A base 1, an annular slewing support connected to the base 1, the slewing support includes two parts, the slewing support inner ring 2 and the slewing support outer ring 3, the slewing support outer ring 3 has a tooth-like structure;
[0028] One side of the base 1 is provided with a driving device 4, the driving device 4 includes a motor bracket 41 arranged on the upper end of the base 1, the inside of the motor bracket 41 is provided with a driving motor 43, and the output shaft end of the driving motor is connected to There is a driving gear 42, and the driving gear 42 meshes with the slewing support ou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More