

Six-dimensional force sensor
A six-dimensional force sensor and center platform technology, applied in the field of sensors, can solve the problems of multi-dimensional force sensor stiffness and sensitivity that need to be further studied
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
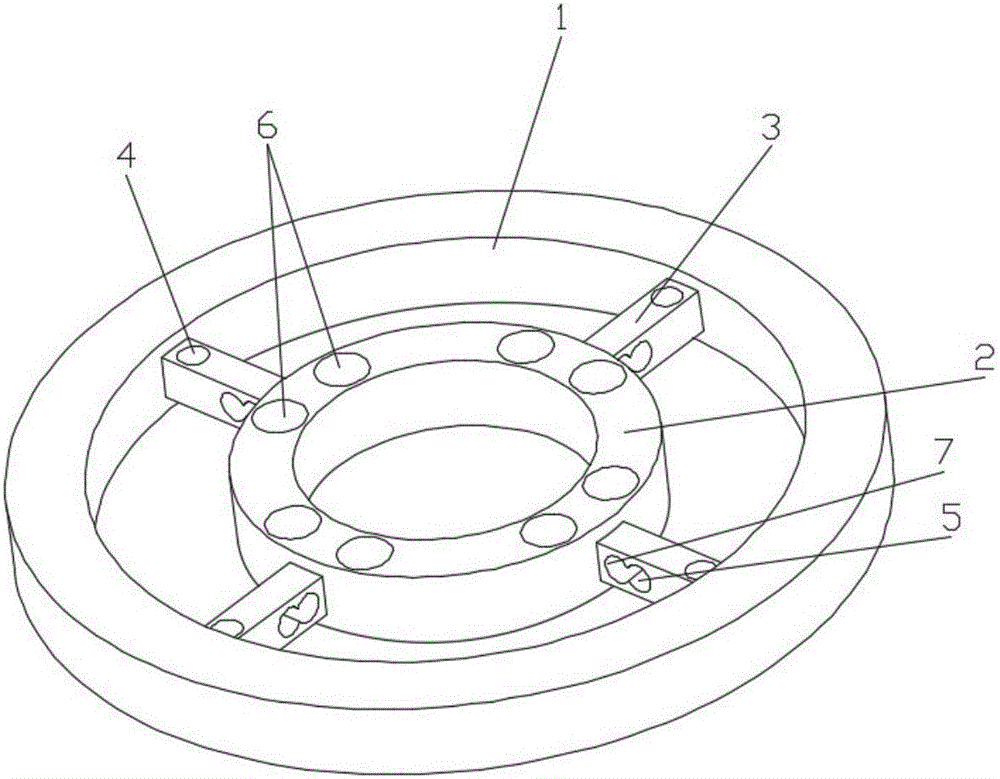
[0049] see figure 1 , figure 2 and image 3 , the six-dimensional force sensor in this embodiment has a circumferential support 1, a center platform 2 and a radial beam 3;
[0050] The radial beams 3 are evenly distributed around the center platform 2, one end of the radial beam 3 is connected to the outer wall of the center platform 2 in a "T" shape, and the other end of the radial beam 3 is connected to the inner wall of the circumferential support 1 in a "T" shape. T" type connection, beam through holes are provided on the radial beam 3, so that the stress is concentrated on both sides of the beam through holes.
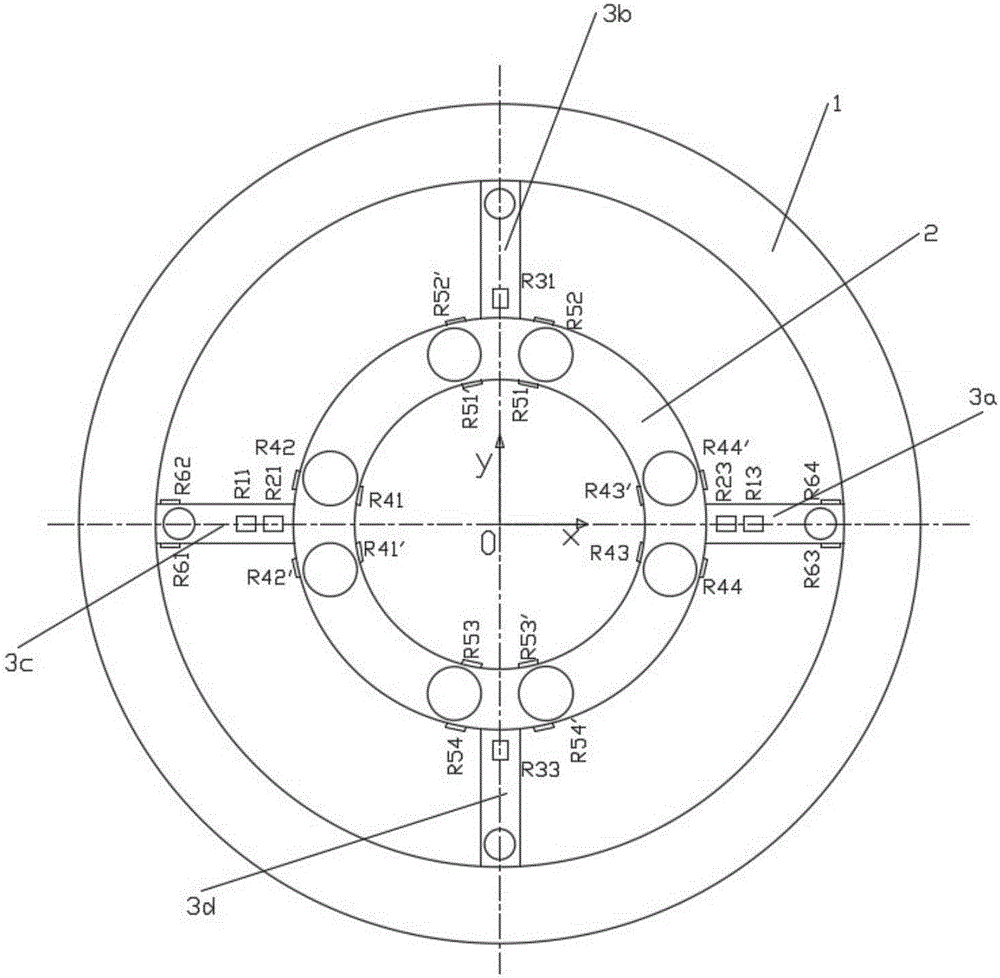
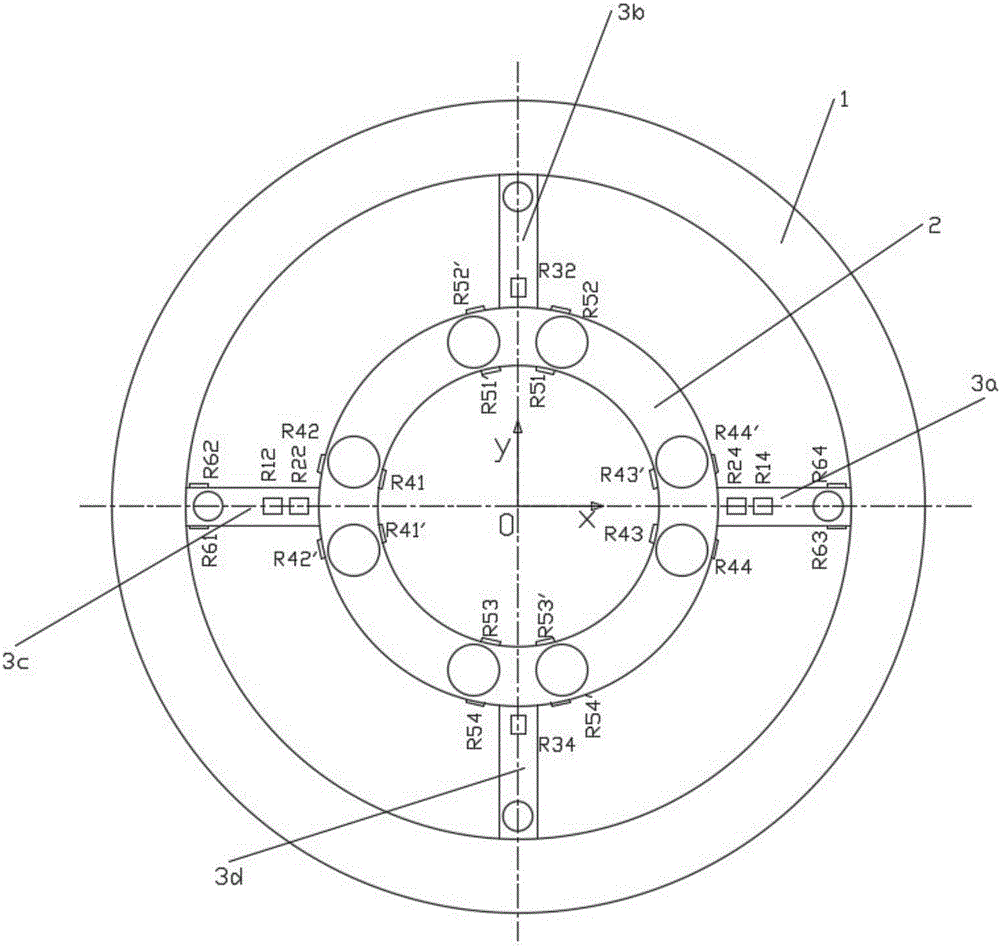
[0051] figure 1 There are four radial beams 3 shown, and the four radial beams 3 are centered on the center of the center platform 1, and are distributed in the shape of a "ten"; the center platform 2 and each radial beam 3 are in a horizontal state; the center platform 1 The center point of is the coordinate origin to establish a three-dimensional coordinate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More