

Negative obstacle detection method based on local structure feature of laser radar point cloud
A technology of obstacle detection and laser radar, applied in the field of robot obstacle avoidance detection, can solve the problem of poor detection effect of negative obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0120] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
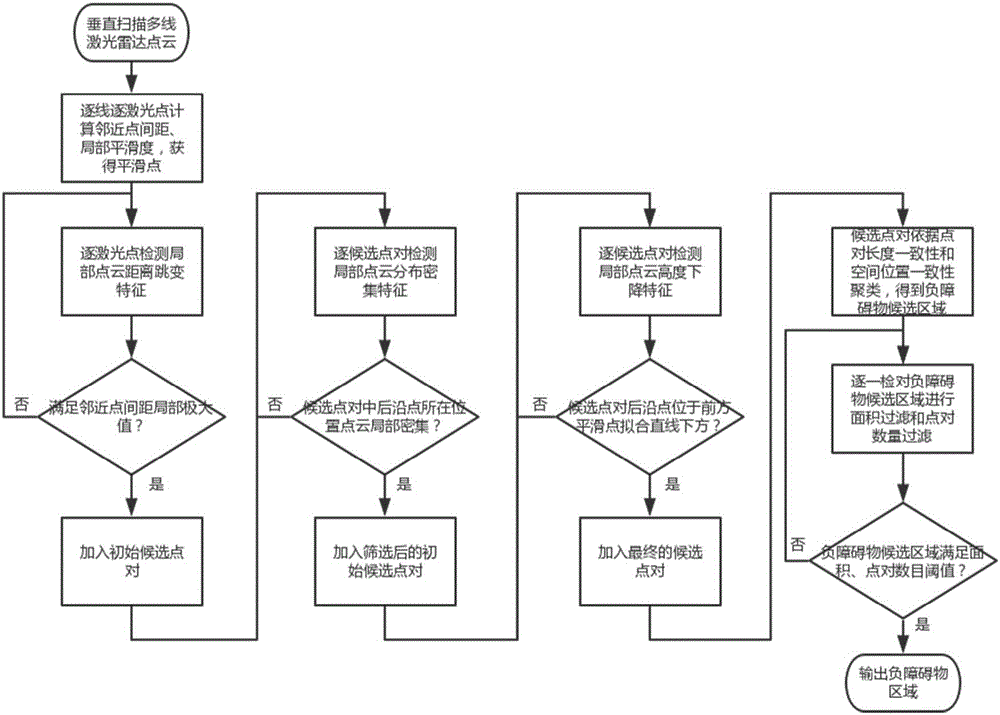
[0121] Such as figure 1 Shown, the embodiment of the inventive method and implementation process thereof are as follows:
[0122] A typical example of a scene containing negative obstacles is used to more clearly represent the process of the present invention.
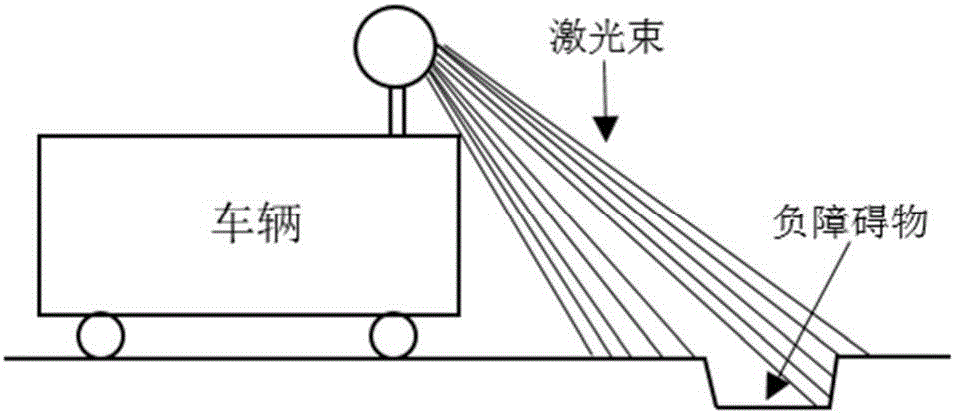
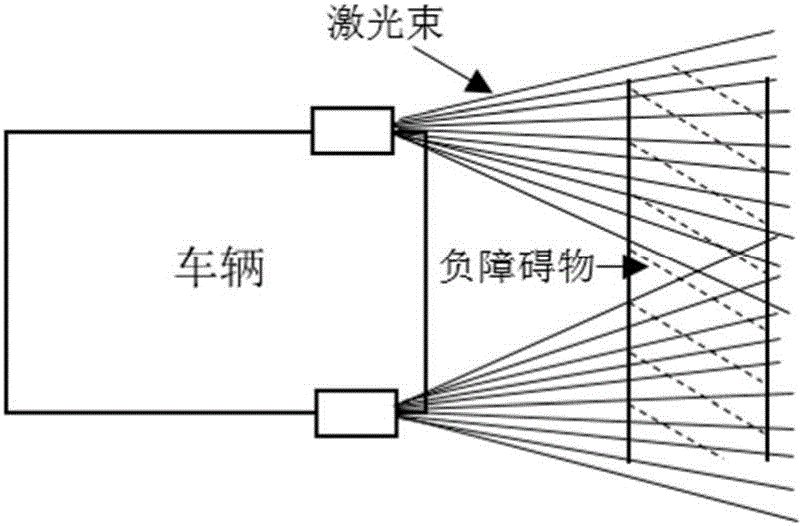
[0123] The point cloud data of the embodiment is collected by two lidars installed in the front of the vehicle. The arrangement and acquisition methods of the two lidars are as follows: figure 2 and image 3 As shown, the laser radar works in the way of multi-line laser rotary scanning, and one laser line corresponds to a continuous distribution of point clouds.
[0124] Scene opinion Figure 4 , where the upper left is the top view of the lidar point cloud, the upper right is the real image of the scene, the middle right is the corresponding grid attribute map, and the lower is the 3D rend...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More