

Laser radar 3D real-time target detection method fusing multi-frame time sequence point cloud
A laser radar and target detection technology, applied in image data processing, instrument, character and pattern recognition, etc., can solve the problems of low detection accuracy and weak real-time performance, and achieve a simplified network structure, strong real-time performance and low computational cost. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0133] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
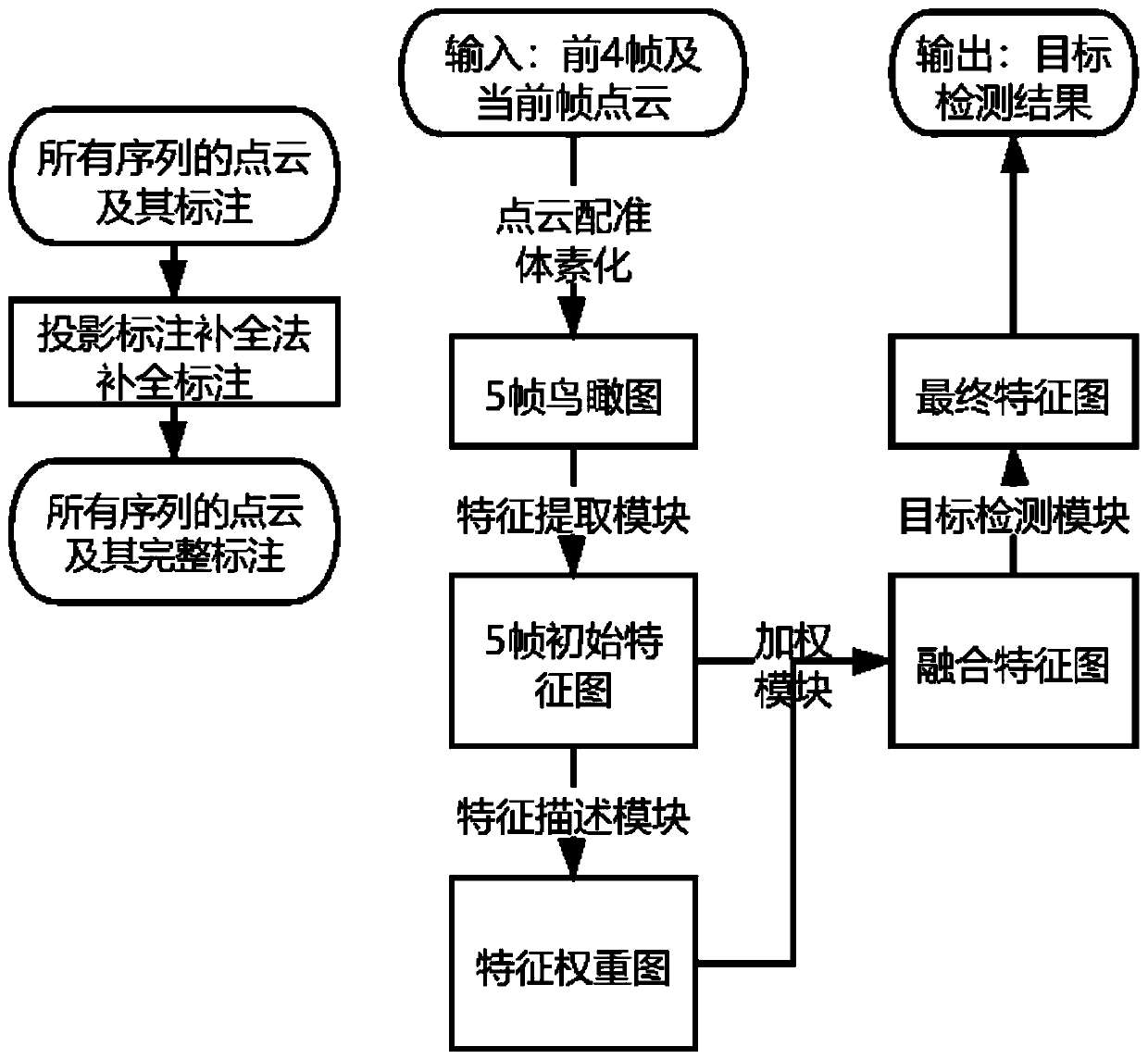
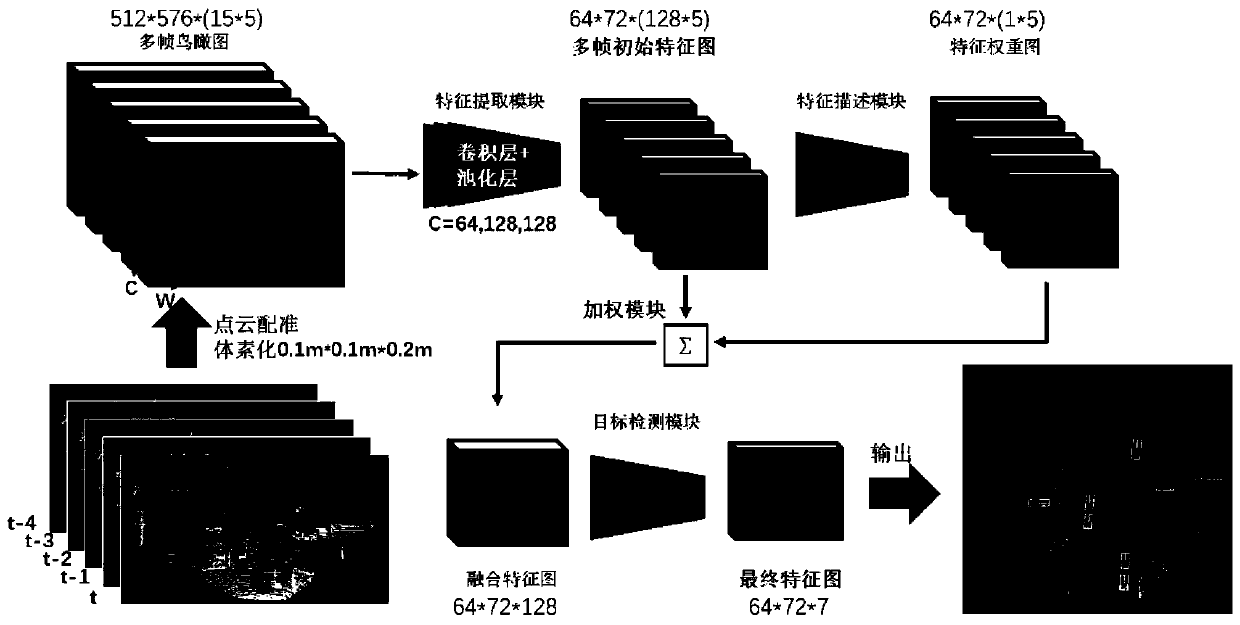
[0134] Such as figure 1 Shown in the flowchart of, the embodiment of the inventive method and implementation process thereof are as follows:
[0135] Taking the KITTI RAW public data set as a known data set and detecting vehicle targets as an example, the idea and specific implementation steps of lidar 3D real-time target detection fused with multi-frame time-series point clouds are described.
[0136] The point cloud of the embodiment and its uncompleted annotations are all from the KITTI RAW public dataset.
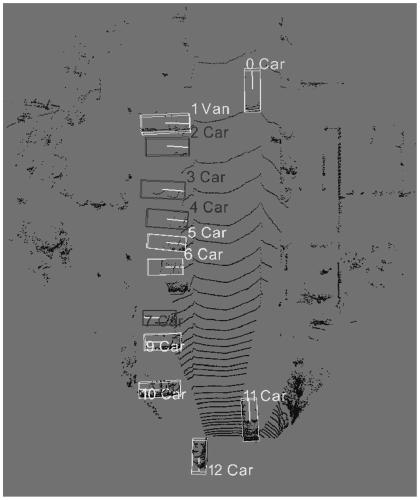
[0137] Step 1: Implement inventions (1.1) to (1.3) on all sequences of the KITTI RAW public data set. For vehicle targets, the vehicle targets specifically include two types of cars (Car) and large trucks (Van), which are open to KITTI RAW Each sequence of the data set is processed as follows: Obtain the corner coordinates of the annotation fra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More