

Multi-pose portable tracked robot
A crawler robot, portable technology, applied in crawler vehicles, motor vehicles, transportation and packaging, etc., can solve the problems of weak road adaptability, complex robot structure, late research start, etc., to achieve enhanced mobility and good road adaptability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
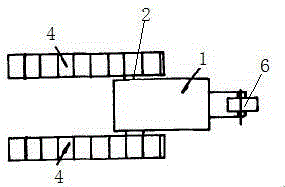
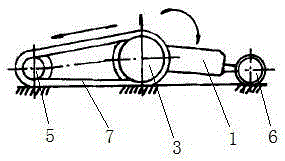
[0013] Such as figure 1 with figure 2 A kind of multi-posture portable crawler robot shown includes a load-bearing unit 1 and a motion unit; the load-bearing unit 1 is arranged in the middle of the motion unit through a transmission shaft 2; drive wheels 3 are installed on both sides of the transmission shaft 2; the motion The unit includes a side wing plate 4, a rear wheel 5 arranged on one side of the side wing plate 4, and a transmission track 7 installed on the side wing plate 4 and sleeved on the outside of the driving wheel 3 and the rear wheel 5; A crawler drive motor (not shown) is installed; left and right side flap drive motors (not shown) are installed in the bearing unit 1 .
[0014] Wherein, a front wheel 6 is installed on one side of the carrying unit 1 .
[0015] The carrying unit 1 is an intermediate body.
[0016] In the multi-posture portable crawler robot of the present invention, the robot directly drives the rear crawler wheel through the crawler drive...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More