

Driven swinging arm type rhombic moonmobile moving system with actively-adjustable front and rear frames
A mobile system and lunar rover technology, applied in the field of passive rocker arm type diamond lunar rover mobile system, can solve the problems of poor climbing and obstacle crossing ability, inability to give full play to motor efficiency, poor vehicle body stability, etc., and achieve good mobility The effect of stability, good off-road performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
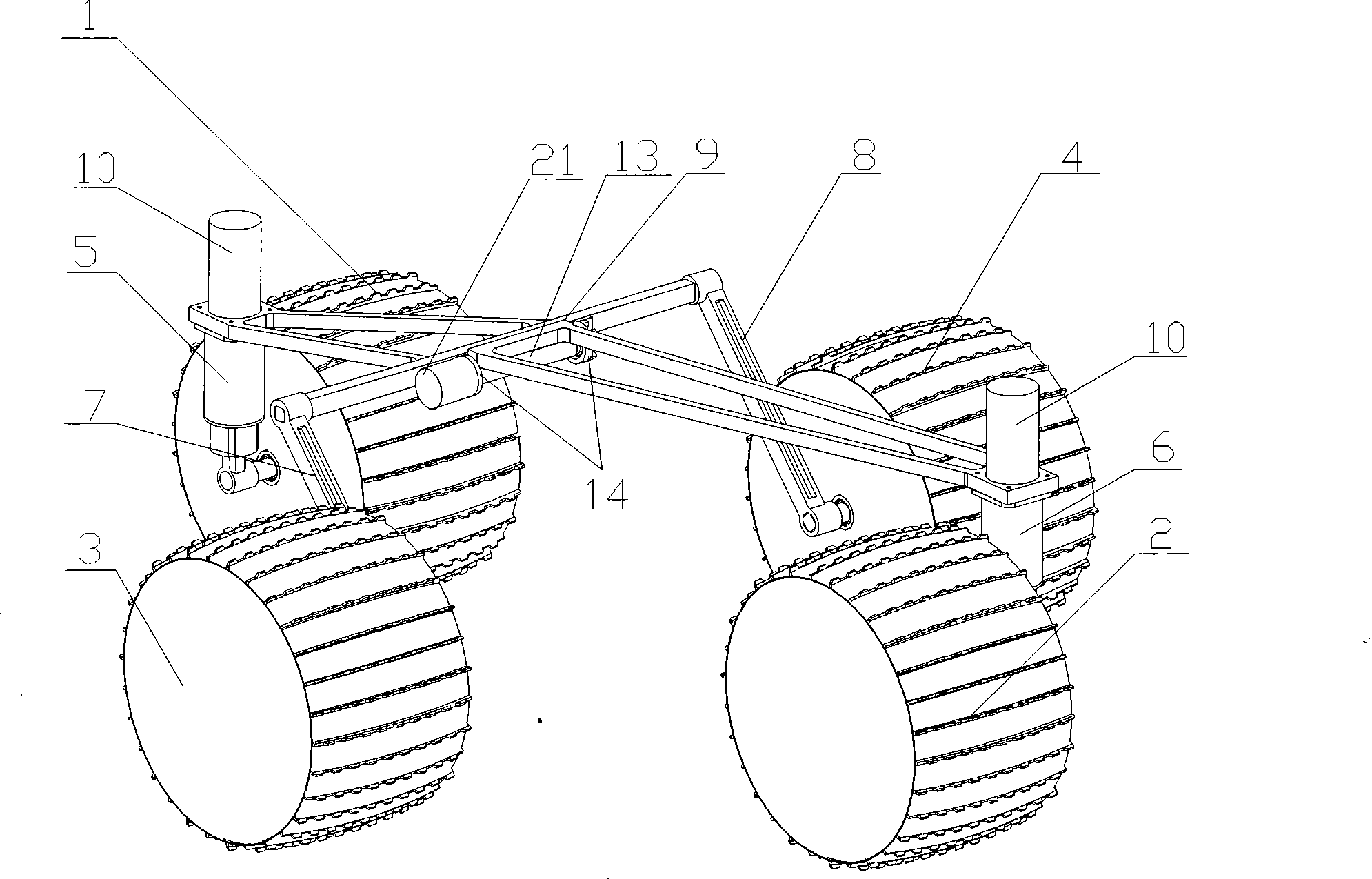
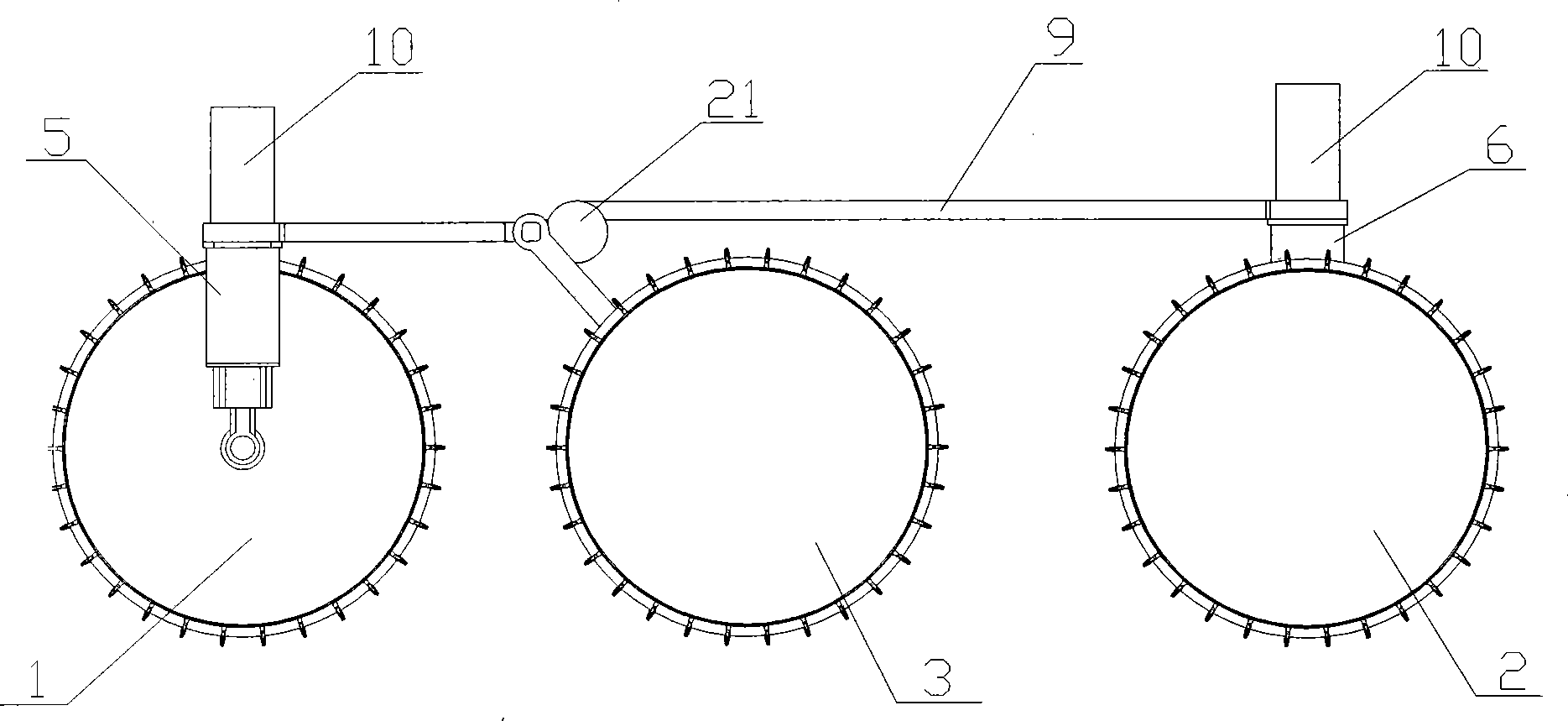
[0032] like figure 1 , figure 2 , image 3 and Figure 4 As shown, the active adjustable passive rocker arm type rhombic lunar rover mobile system of the present invention includes a rotatable vehicle frame 9 and a front wheel 1, a rear wheel 2, and a left wheel arranged in a diamond shape on the vehicle frame 9. 3 and the right wheel 4, the front wheel 1 and the rear wheel 2 are respectively fixed on the vehicle frame 9 by the front suspension system 5 and the rear suspension system 6, and the left wheel 3 and the right wheel 4 are respectively passed by the left suspension system 7 and the right suspension system System 8 is fixed on vehicle frame 9, and front suspension system 5 and rear suspension system 6 are all made up of connecting mechanism and steering mechanism, and left suspension system 7 and right suspension system 8 only do connecting mechanism. Vehicle frame 9 is made up of front vehicle frame 11, rear vehicle frame 12, rotating shaft 13, spacing bearing se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More