

Under-actuated prosthetic hand
A prosthetic hand, under-actuated technology, applied in the field of medical equipment, can solve the problem of no corresponding functional prosthesis
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The underactuated prosthetic hand of the present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments.
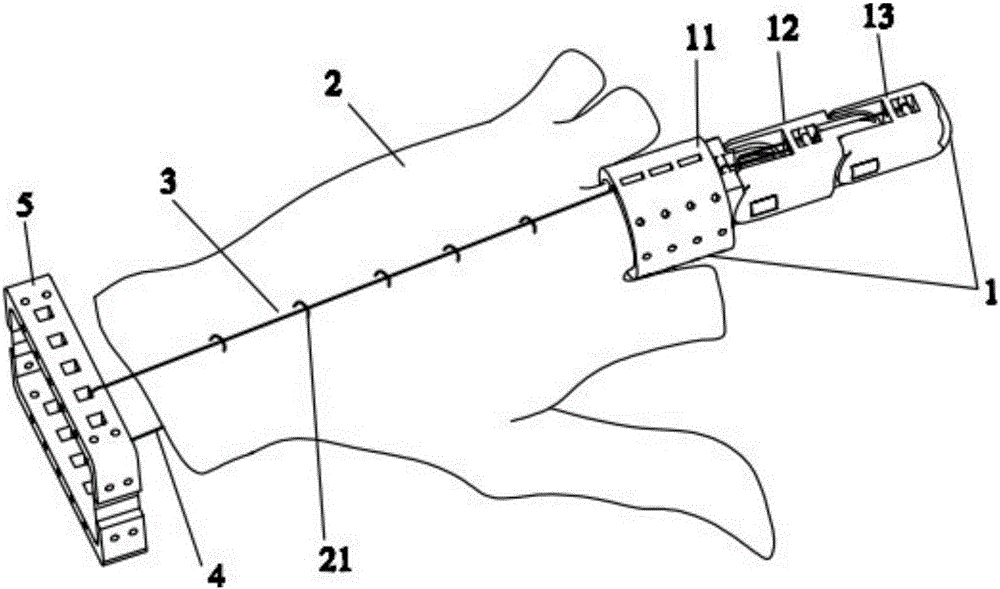
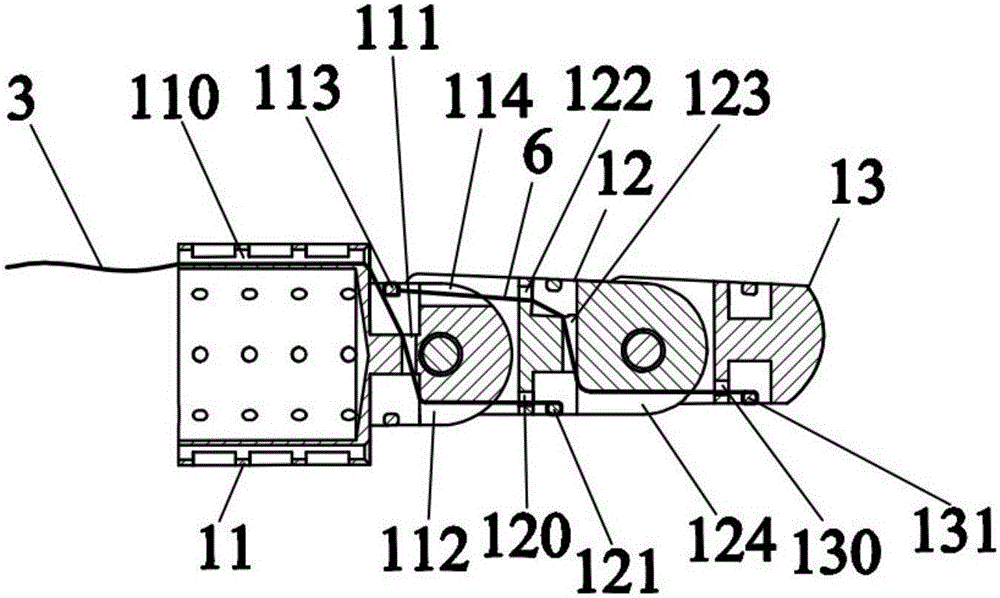
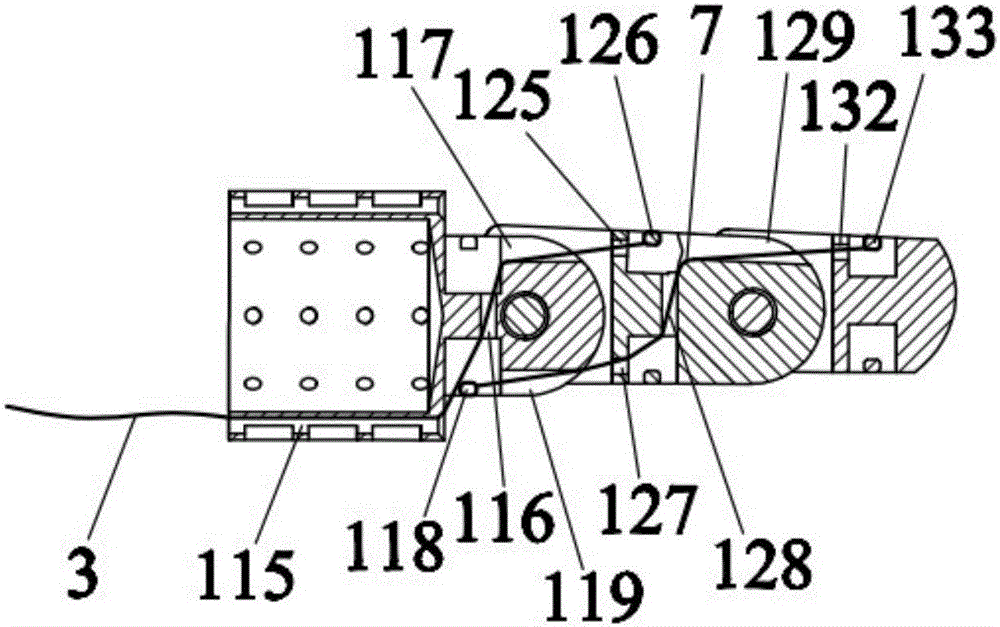
[0030] Such as Figure 1-8 As shown, an underactuated prosthetic hand includes a finger body 1, a glove 2, a first flexor tendon 3, a first extensor tendon 4, and a wrist anchor 5. The finger body 1 is connected to the glove 2, and the first flexor tendon 3 and the first One end of an extensor tendon 4 is connected to the finger body 1 along the back and front of the glove 2 respectively, and the wrist fixing member 5 is connected to the first flexor tendon 3 and the other end of the first extensor tendon 4 . The front and the back of the glove 2 are respectively provided with wire sleeves 21, which are used to restrict the movement tracks of the first flexor tendon 3 and the first extensor tendon 4. The prosthetic hand is mainly aimed at patients with severed palms and fingers. For patients with stump fing...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More