

Self-adaptive autonomous emergency brake control algorithm based on road adhesion
A technology of emergency braking and road adhesion, applied in the direction of brakes, automatic starting devices, etc., can solve the problems of low control accuracy, no consideration of road adhesion coefficient, etc., and achieve good driving safety effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] A self-adaptive emergency braking control algorithm for self-adaptive road adhesion is introduced below with reference to the accompanying drawings and examples.
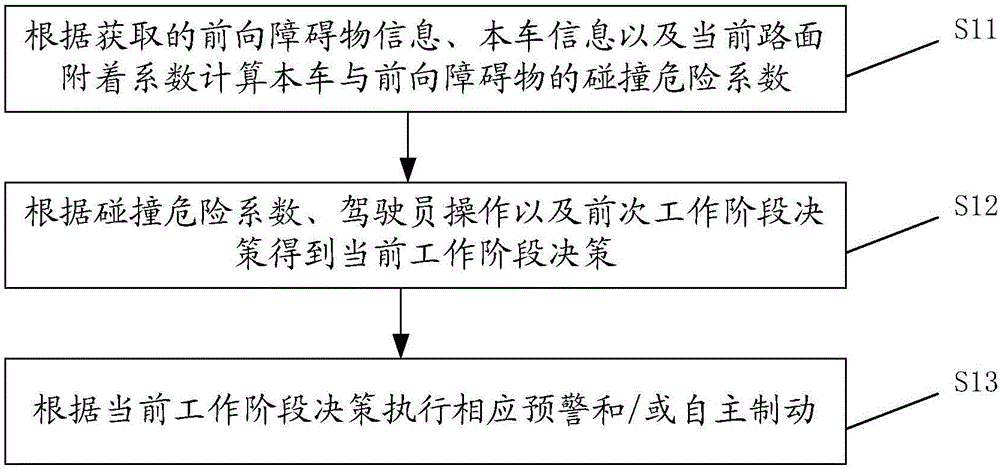
[0043] Such as figure 1 A road surface adhesion adaptive autonomous emergency braking control algorithm is shown, including the following steps:
[0044] S11. Calculate the collision risk coefficient between the vehicle and the forward obstacle according to the obtained forward obstacle information, the own vehicle information and the current road surface adhesion coefficient.
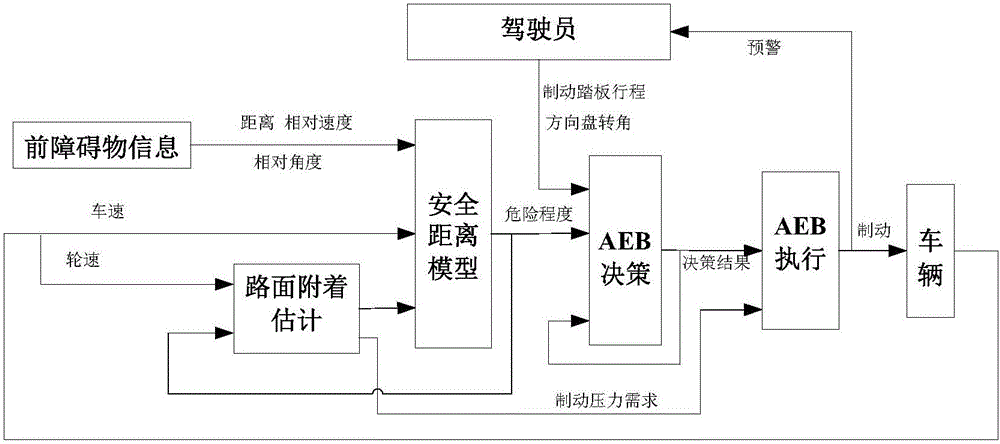
[0045] Step S11 calculates based on the safe distance model. The safe distance model calculates the relative acceleration based on the obtained distance, relative speed and relative angle between the vehicle and the forward obstacle, and estimates the speed of the forward obstacle according to the speed and acceleration of the vehicle and acceleration; calculate the critical warning distance and critical emergency braking distance ac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More