

Lower limb walking aid exoskeleton andwalking aid method thereof
A technology of exoskeleton and lower limbs, which is applied in the field of exoskeleton and walking aids for lower limbs. It can solve problems such as large motor torque, insufficient matching degree of lower limbs, high precision of rotating joints, and high requirements for manufacturing processes, so as to improve safety and guarantee tightness effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
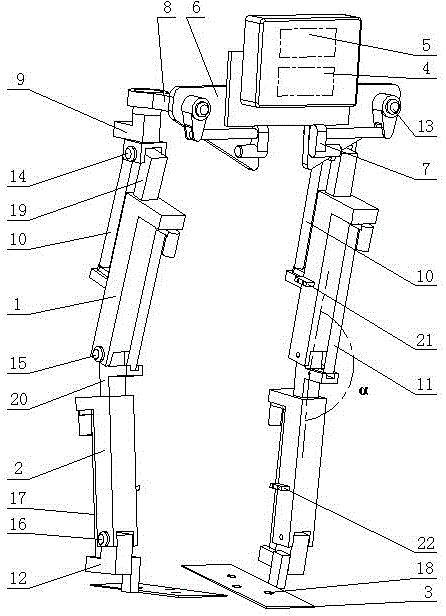
[0032] The lower extremity walking aid exoskeleton of this embodiment, such as Figure 1-Figure 3 as shown,
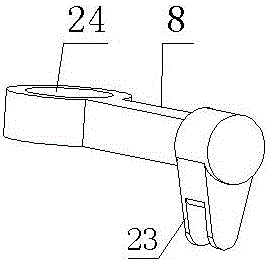
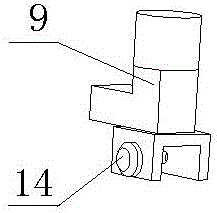
[0033]A walking-assisting exoskeleton for lower limbs, which comprises: a symmetrically arranged thigh mechanical joint 1, a mechanical calf joint 2, and a foot support 3, and the walking-assisting exoskeleton for lower limbs also includes a battery 4, a general control Fixed support plate 6, a pair of hip electric actuators 7, hip rotary joints 8, whole leg rotary joints 9, thigh joint electric actuators 10, knee joint electric actuators 11, ankle rotary joints 12, crotch angle detection Sensor 13, thigh joint angle detection sensor 14, calf joint angle detection sensor 15, ankle joint angle detection sensor 16, ankle joint electric push rod 17 and foot pressure sensor 18;
[0034] The mechanical joints 1 of the two legs are connected through the back fixed support plate 6, and the joint is located at the corresponding position of the crotch of the human body. The to...
specific Embodiment approach 2
[0042] The difference from Embodiment 1 is that in the lower limb walking exoskeleton of this embodiment, the lower limb walking exoskeleton also includes a thigh part length adjustment joint 19, and the thigh mechanical joint 1 is provided with guide rails, and the thigh part length The adjustment joint 19 is inserted into the guide rail by the top of the thigh mechanical joint 1, and the thigh mechanical joint 1 is hinged upwardly with the overall rotation joint 9 of the leg through the thigh part length adjustment joint 19; and the connection between the thigh joint electric push rod 10 and the thigh part length adjustment joint 19 Realize driving the rotation of the thigh mechanical joint 1 .
specific Embodiment approach 3
[0044] The difference from Embodiment 1 or Embodiment 2 is that in the lower limb walking exoskeleton of this embodiment, the lower limb walking exoskeleton also includes a calf part length adjustment joint 20, and a guide rail is arranged in the calf mechanical joint 2, and the calf The partial length adjustment joint 20 is inserted into the guide rail by the top of the calf mechanical joint 2, and the calf mechanical joint 2 is hinged upwardly with the thigh mechanical joint 1 through the calf partial length adjustment joint 20; Realize driving the rotation of the calf mechanical joint 2 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More